Актуальность создания роботизироанных морских подвижных объектов (МПО) обусловлена необходимостью
- экологического мониторинга водных ресурсов;
- картографии морских и речных судоходных каналов, портов, бухт, заводей;
- повышения уровня контроля морских акваторий;
- повышения эффективности освоения ресурсов в труднодоступных районах (Арктика и Дальний Восток);
- повышения интеллектуализации морского транспорта;
- повышения конкурентоспособности отечественного судостроения и снижения зависимости от зарубежных технологий.
Основные направления исследования и продукты
- Разработка систем интеллектуального планирования движений и адаптивного управления автономных необитаемых подводных аппаратов
- Разработка систем интеллектуального планирования движений и адаптивного управления автономных безэкипажных судов
- Разработка систем математического и полунатурного моделирования морских подвижных объектов(МПО)
- Разработка тренажёрных комплексов для операторов автономных морских подвижных объектов
Предлагаемые методы и подходы к решению поставленных задач
- Метод построения нелинейных многосвязных математических моделей с определением гидродинамических характеристик
- Метод позиционно-траекторного управления для построения автопилотов
- Методы комплексирования навигационных данных для повышения точности определения координат
- Теория синтеза нелинейных наблюдателей для оценки неопределенных внешних сил и неизвестных параметров МПО
- Метод конструирования интеллектуальных планировщиков перемещений для обхода стационарных и подвижных препятствий
- Метод использования неустойчивых режимов работы системы управления для обхода препятствий при минимизации требований к сенсорной подсистеме МПО и вычислительным затратам
Предлагаемые систем автоматического управления морскими подвижными объектами
Как показывает обзор существующих систем управления МПО, современные подходы к конструированию систем обеспечивают заданное качество управления в узком диапазоне от заданного режима движения. В ситуации, когда скорость течения внешней среды превышает или сравнима со скорость МПО, условия разделения взаимосвязанного движения на отдельные каналы не выполняются, а углы дрейфа нельзя считать малыми. В этих случаях требуется планировать и реализовывать траекторию движения МПО с учетом многосвязности движения, используя внешние неуправляемые течения. Если, какое-либо возмущение (например, сильное течение, которое нельзя компенсировать полностью из-за энергетических ограничений) выведет МПО в область «больших» отклонений, то это может привести к нарушению устойчивости и, как следствие, аварийной или критической ситуации.В этой связи актуальной является проблема разработки методов позиционно-траекторного управления морскими роботизированными системами в экстремальных режимах и условиях априорной неопределенности среды.
При разработке систем управления МПО необходимо выполнить следующие этапы проектирования:
1. Построение математической модели
2. Синтез автопилота
3. Программно-аппаратная реализация
Этапы проектирования систем управления морскими подвижными объектами
Построение математической модели

Система координат подводного аппарата

Система координат надводного аппарата катамаранного типа
Адекватная математическая модель движения МПО необходима для разработки эффективной системы управления его движением в подводном режиме. Особое значение имеет адекватность математической модели при осуществлении указанных движений МПО, как необитаемого аппарата. Корректное построение математической моделиМПо в значительной степени определяет качество проектирования системы управления движением МПО и, в первую очередь, адекватность результатов проектирования реальным свойствам разрабатываемой системы управления.





Синтез автопилота и алгоритмов функционирования
Оригинальный запатентованный алгоритм управления обеспечивает формирование управляющих воздействий на исполнительные механизмы МПО для выполнения следующих задач:
- стабилизация в заданной точке пространства базовых координат и, в случае необходимости, с желаемыми значениями углов ориентации;
- движение вдоль заданных траекторий с постоянной скоростью V и заданной ориентацией;
- перемещение в заданную точку вдоль заданной траектории, с заданной ориентацией и без предъявления дополнительных требований к скорости и др..

Упрощенная структура автопилота
Программно-аппаратная реализация
Мы предлагаем программно-аппаратный комплекс, который реализует алгоритмы упрвления, планирования, навигации,взаимодействия оборудования, и включает в себя:
бортовой вычислитель
наземный или мобильный пункт управления
навигационную систему
сенсорную подсистему, в том числе систему технического зрения

Для отработки программно-алгоритмической части системы управления МПО разрабатывается программно-моделирующий комплекс. Функциональность предлагаемого комплекса позволяет симулировать внешнюю среду, датчики, навигационную систему и систему технического зрения, так же задавать из погрешности.






После отработки алгоритмы управления и реализации их на бортовом вычилслителе проводим верификацию программного обеспечения путем полунатурного моделирования

Выполненные проекты
- ОКР «Разработка интегрированного комплекса навигации и управления движением для автономных необитаемых подводных аппаратов», 2010 г., ОКБ ОТ РАН
- НИР«Разработка интегрированной системы управления и навигации автономных необитаемых подводных аппаратов для решения задач разведки, патрулирования и поисково-спасательных мероприятий», 2012 г. ЮФУ
- НИР «Разработка интеллектуальной системы управления движением автономных необитаемых подводных аппаратов»,2012-2013 г, ИПМТ ДВО РАН
- ОКР «Разработка системы управления типовых платформ АНПА» 2012 — 2014 г, «ЦНИИ «Курс»
- ОКР «Разработка технического проекта ряда перспективных типовых платформ АНПА», 2012 — 2014 г, «ЦНИИ «Курс»
- НИР «Разработка автономной робототехнической системы на базе надводного мини-корабля «, 2013, ЮФУ
- НИР «Разработка метода аналитического синтеза оптимальных многосвязных нелинейных систем управления», 2010 – 2012 г., грант РФФИ.
- НИР «Разработка теоретических основ построения и исследование систем управления подвижными объектами, функционирующими в априори неформализованных средах, с использованием неустойчивых режимов», 2010 – 2012 г., грант РФФИ.
- НИР «Теория и методы позиционно-траекторного управления морскими роботизированными системами в экстремальных режимах и условиях неопределенности среды» (№114041540005). 2014-2016
- РФФИ 16-08-00013 Разработка метода двухконтурной адаптации систем позиционно-траекторного управления с использованием робастных наблюдателей возмущений и эталонных моделей. 2016-2018
- ОКР «Разработка бэзэкипажного катера для экологического мониторинга азвского моря»
 Проект по разработке автономного мини-катера
Проект по разработке автономного мини-катера
 Проект по разработке системы автоматического управления типовыми платформами АНПА
Проект по разработке системы автоматического управления типовыми платформами АНПА
 Инициативный проект по разработке интеллектуальной системы управления надводным катером
Инициативный проект по разработке интеллектуальной системы управления надводным катером
Патенты







Дополнительные материалы
Публикации
- Пшихопов В.Х., Медведев М.Ю. Управление подвижными объектами. – М.: НАУКА, 2011 г. – 350 с.
- Пшихопов В.Х. и др. Структурная организация систем автоматического управления подводными аппаратами для априори неформализованных сред // Информационно-измерительные и управляющие системы. М.:Радиотехника. 2006.- №1-3- Т4 — С. 73-78.
- Пшихопов В.Х., Медведев М.Ю Адаптивное управление нелинейными объектами одного класса с обеспечением максимальной степени устойчивости Известия ЮФУ. Технические науки. Тематический выпуск «Перспективные системы и задачи управления». – Таганрог: ТТИ ЮФУ.- 2012.-№3(116) – С.180-186
- Гуренко Б.В. Построение и исследование математической модели подводного аппарата // Специальный выпуск журнала «Вопросы оборонной техники. Серия 9», 2010 г. — С. 35-38.
- Пшихопов В.Х., Суконки С.Я., Нагучев Д.Ш., Стракович В.В., Медведев М.Ю., Гуренко Б.В. , Костюков В.А. Автономный подводный аппарат «СКАТ» для решения задач поиска и обнаружения заиленных объектов // Известия ЮФУ. Технические науки. Тематический выпуск «Перспективные системы и задачи управления». – Таганрог: ТТИ ЮФУ.-2010.-№3(116) – С.153-163.*
- Гуренко Б.В. Структурный синтез автопилотов для необитаемых подводных аппаратов // Известия Кабардино-Балкарского научного центра РАН, номер 1–2011 г.
- Гуренко Б.В., Федоренко Р.В. Комплекс моделирования движений подвижных объектов на базе воздухоплавательных и подводных аппаратов // Известия ЮФУ. Технические науки. Тематический выпуск «Перспективные системы и задачи управления». – Таганрог: ТТИ ЮФУ.- 2011.-№3(116) – С.180-186
- Гуренко Б.В. Структурная организация систем автоматического управления подводными глайдерами // Известия ЮФУ. Технические науки. Тематический выпуск «Перспективные системы и задачи управления». – Таганрог: ТТИ ЮФУ.- 2011. — №3(116) – С.199-205
- Пшихопов В.Х., М.Ю. Медведев, Б.В. Гуренко, А.А. Мазалов Адаптивное управление нелинейными объектами одного класса с обеспечением максимальной степени устойчивости // Известия ЮФУ. Технические науки. Тематический выпуск «Перспективные системы и задачи управления». – Таганрог: ТТИ ЮФУ.- 2012.-№3(116) – С.180-186
- Б.В. Гуренко, О.К. Ермаков Обзор и анализ состояния современной надводной робототехники XI Всероссийской научной конференции молодых ученых, студентов и аспирантов «Техническая кибернетика, радиоэлектроника и системы управления»: Сборник материалов. – Таганрог: Изд-во ЮФУ, 2012,–Т. 1, С. 211-212
- Pshikhopov, V.Kh., Medvedev, M.Yu., Gaiduk, A.R., Gurenko, B.V., Control system design for autonomous underwater vehicle, 2013, Proceedings — 2013 IEEE Latin American Robotics Symposium, LARS 2013, pp. 77-82, doi:10.1109/LARS.2013.61.
- Пшихопов В.Х., Гуренко Б.В. Разработка и исследование математической модели автономного надводного мини-корабля «Нептун» [Электронный ресурс] //»Инженерный вестник Дона», 2013, №4. – Режим доступа: http://www.ivdon.ru/ /ru/magazine/archive/n4y2013/1918 (доступ свободный) – Загл. с экрана. – Яз. Рус
- Пшихопов В.Х., Б.В. Гуренко Синтез и исследование авторулевого надводного мини-корабля «Нептун» [Электронный ресурс] // «Инженерный вестник Дона», 2013, №4. – Режим доступа: http://www.ivdon.ru/ru/magazine/archive/ /n4y2013/1919 (доступ свободный) – Загл. с экрана. – Яз. рус.
- Гуренко Б.В. Реализация и экспериментальное исследование авторулевого автономного надводного мини-корабля «Нептун» [Электронный ресурс] // «Инженерный вестник Дона», 2013, №4.Режим доступа: http://www.ivdon.ru/ru/magazine/archive/n4y2013/1920(доступ свободный) – Загл. с экрана. – Яз. рус.
- Программное обеспечение бортовой системы управления автономной робототехнической системы на базе надводного мини-корабля: свидетельство о государственной регистрации программы для ЭВМ №2013660412 / Пшихопов В.Х, Гуренко Б.В., Назаркин А.С. – Зарегистрировано в Реестре программ для ЭВМ 5 ноября 2013 г.
- Программное обеспечение навигационной системы автономной робототехнической системы на базе надводного мини-корабля: свидетельство о государственной регистрации программы для ЭВМ №2013660554 / Гуренко Б.В., Котков Н.Н. – Зарегистрировано в Реестре программ для ЭВМ 11 ноября 2013 г.
- Программно-моделирующий комплекс автономных морских подвижных объектов: свидетельство о государственной регистрации программы для ЭВМ №2013660212 / Пшихопов В.Х., Медведев М.Ю., Гуренко Б.В. – Зарегистрировано в Реестре программ для ЭВМ 28 октября 2013 г.
- Программное обеспечение наземного пункта управления автономной робототехнической системы на базе надводного мини-корабля: свидетельство о государственной регистрации программы для ЭВМ №2013660554 / Гуренко Б.В., Назаркин А.С.– Зарегистрировано в Реестре программ для ЭВМ 28 октября 2013.
- Kh. Pshikhopov, M. Y. Medvedev, and B. V. Gurenko, “Homing and Docking Autopilot Design for Autonomous Underwater Vehicle”, Applied Mechanics and Materials. Vols. 490-491, pp. 700-707, 2014, doi:10.4028/www.scientific.net/AMM.490-491.700.
- Pshikhopov, V.K., Fedotov, A.A., Medvedev, M.Y., Medvedeva, T.N. & Gurenko, B.V. 2014, «Position-trajectory system of direct adaptive control marine autonomous vehicles», 2014 the 4th International Workshop on Computer Science and Engineering — Summer, WCSE 2014.
- Pshikhopov, V., Chernukhin, Y., Fedotov, A., Guzik, V., Medvedev, M., Gurenko, B., Piavchenko, A., Saprikin, R., Pereversev, V. & Krukhmalev, V. 2014, «Development of intelligent control system for autonomous underwater vehicle», 2014 the 4th International Workshop on Computer Science and Engineering-Winter, WCSE 2014.
- Пшихопов В.Х, Медведев М.Ю., Федоренко Р.В., Гуренко Б.В., Чуфистов В.М., Шевченко В.А. Алгоритмы многосвязного позиционно-траекторного управления подвижными объектами // Инженерный вестник дона #4, 2014, url:ivdon.ru/ru/magazine/archive/N4y2014/2579 (доступ свободный) – Загл. с экрана. – Яз. рус.
- Пшихопов В.Х, Федотов А.А, Медведев М.Ю., Медведева Т.Н., Гуренко Б.В., Позиционно-траекторная система прямого адаптивного управления морскими подвижными объектами // Инженерный вестник дона #3, 2014, url:ivdon.ru/ru/magazine/archive/n3y2014/2496 (доступ свободный) – Загл. с экра-на. – Яз. рус.
- Гуренко Б.В. Построение и исследование математической модели автономного необитаемого подводного аппарата // Инженерный вестник дона #4, 2014, url:ivdon.ru/ru/magazine/archive/N4y2014/2626 (доступ свободный) – Загл. с экра-на. – Яз. рус.
- Гуренко Б.В., Федоренко Р.В., Назаркин А.С. Система управления автономного надводного мини-корабля // Современные проблемы науки и образования. – 2014. – № 5; url:www.science-education.ru/119-14511 (дата обращения: 10.09.2014).
- Пшихопов В.Х., Чернухин Ю.В., Федотов А.А., Гузик В.Ф., Медведев М.Ю., Гуренко Б.В., Пьявченко А.О., Сапрыкин Р.В., Переверзев В.А., Приемко А.А. Разработка интеллектуальной системы управления автономного подводного аппарата // Известия ЮФУ. Технические науки. Таганрог: ТТИ ЮФУ – 2014. – № 3(152). – С. 87 – 101.
- Пшихопов В.Х., Гуренко Б.В., Медведев М.Ю., Маевский А.М., Голосов С.П. Оценивание аддитивных возмущений АНПА робастным наблюдателем с нелинейными обратными связями // Известия ЮФУ. Технические науки. Таганрог: ТТИ ЮФУ – 2014. – № 3(152). – С. 128 – 137.
- Пшихопов В.Х., Федотов А.А., Медведев М.Ю., Медведева Т.Н., Гуренко Б.В., Задорожный В.А. Позиционно-траекторная система прямого адаптивного управления морскими подвижными объектами // Сборник материалов Девятой Всероссийской научно-практической конференции «Перспективные системы и задачи управления». Таганрог. Изд-во ЮФУ, 2014. – С. 356 – 263.
- Гуренко Б.В., Федоренко Р.В., Береснев М.А., Сапрыкин Р.В., Переверзер В.А., Разработка симулятора автономного необитаемого подводного аппарата // Инженерный вестник дона #3, 2014, http://ivdon.ru/ru/magazine/archive/n3y2014/2504. (доступ свободный) – Загл. с экрана. – Яз. рус.
- Копылов С.А., Федоренко Р.В., Гуренко Б.В., Береснев М.А. Программный комплекс для обнаружения и диагностики аппаратных отказов в роботизированных морских подвижных объектах // Инженерный вестник дона #3, 2014, url:ivdon.ru/ru/magazine/archive/n3y2014/2526. (доступ свободный) – Загл. с экрана. – Яз. рус.
- Gurenko, «Mathematical Model of Autonomous Underwater Vehicle,» Proc. of the Second Intl. Conf. on Advances In Mechanical and Robotics Engineering — AMRE 2014, pp. 84-87, 2014, doi:10.15224/ 978-1-63248-031-6-156
- Гайдук А.Р. Плаксиенко Е.А. Гуренко Б.В. К синтезу систем управления с частично заданной структурой // Научный вестник НГУ. Новосибирск, №2(55) 2014, С. 19-29.
- Гайдук А.Р., Пшихопов В.Х., Плаксиенко Е.А., Гуренко Б.В. Оптимальное управление нелинейными объектами с применением квазилинейной формы // Наука и образование на рубеже тысячелетий. Сб. научн.-исслед. работ КГТИ. Вып.1, Кисловодск. 2014 с 35-41
- Гуренко Б.В., Копылов С.А., Береснев М.А. Разработка схемы диагностики отказов подвижных объектов // Международный научный институт Educatio. — 2014. — №6. — с.49-50.
- Устройство управления подводным аппаратом: Патент на полезную модель №137258 / Пшихопов В.Х., Дорух И.Г., Гуренко Б.В. – Зарегистрировано в Государственном реестре полезных моделей РФ 10 февраля 2014 г.
- Система управления подводным аппаратом (Патент на изобретение №2538316) Зарегистрировано в Государственном реестре изобретений РФ 19 ноября 2014 г. 1 стр. Пшихопов В.Х., Дорух И.Г.
- Pshikhopov, Y. Chernukhin, V. Guzik, M. Medvedev, B. Gurenko, A. Piavchenko, R. Saprikin, V. Pereversev, V. Krukhmalev, «Implementation of Intelligent Control System for Autonomous Underwater Vehicle,» Applied Mechanics and Materials, Vols 701 — 702, pp. 704-710, 2015, doi: 10.4028/www.scientific.net/AMM.701-702.704
- Gurenko, R. Fedorenko, A. Nazarkin, «Autonomous Surface Vehicle Control System,» Applied Mechanics and Materials, Vols 704, pp. 277-282, 2015, doi: 10.4028/www.scientific.net/AMM.704.277
- А.Р. Гайдук, Б.В. Гуренко, Е.А. Плаксиенко, И.О. Шаповалов Разработка алгоритмов управления безэкипажным катером, как многомерным нелинейным объектом // Известия ЮФУ. Технические науки. – 2015. – № 1. – С. 250 – 261.
- Б.В. Гуренко Разработка алгоритмов сближения и стыковки автономного необитаемого подводного аппарата с подводной станцией базирования // Известия ЮФУ. Технические науки. – 2015. – № 2. – С. 162 – 175.
- Пшихопов В.Х., Медведев М.Ю., Гуренко Б.В. Алгоритмы адаптивных позиционно-траекторных систем управления подвижными объектами Проблемы управления, М.: – 2015 г., вып. 4, С. 66 –76 .
- http://dx.doi.org/10.4028/www.scientific.net/AMM.799-800.1001
- Р.В. Федоренко, Б.В. Гуренко Планирование траектории автономного мини-корабля // Инженерный вестник Дона. – 2015. – №4. – url: ivdon.ru/ru/magazine/archive/n4y2015/3280
- Б.В. Гуренко, А.С. Назаркин Реализация и идентификация параметров автономного необитаемого подводного аппарата типа глайдер // инженерный вестник Дона. – 2015. – №4. – url: ivdon.ru/ru/magazine/archive/n4y2015/3288
- Гуренко Б.В., Назаркин А.С. Дистанционное управление надводным роботизированным катером // н.т.к., посв. Дню Российской науки и 100-летию ЮФУ. Сборник материалов конференции. — Ростов-на-Дону: Изд-во ЮФУ, 2015. — с. 158-159
- Костюков В.А., Маевский А.М., Гуренко Б.В. Математическая модель надводного мини-корабля // Инженерный вестник Дона. – 2015. – №4. – url: http://ivdon.ru/ru/magazine/archive/n3y2015/3297
- Костюков В.А., Кульченко А.Е., Гуренко Б.В. Методика расчета гидродинамических коэффициентов АНПА // Инженерный вестник Дона. – 2015. – №3. – url: ivdon.ru/ru/magazine/archive/n3y2015/3226
- Pshikhopov, M. Medvedev, B. Gurenko, «Development of Indirect Adaptive Control for Underwater Vehicles Using Nonlinear Estimator of Disturbances», Applied Mechanics and Materials, Vols. 799-800, pp. 1028-1034, 2015, doi:10.4028/www.scientific.net/AMM.799-800.1028
- Gurenko, A. Beresnev, «Development of Algorithms for Approaching and Docking Underwater Vehicle with Underwater Station «, MATEC Web of Conferences, Vol. 26, 2015, doi: dx.doi.org/10.1051/matecconf/2015260400
- Gurenko, R.Fedorenko, M.Beresnev, R. Saprykin, «Development of Simulator for Intelligent Autonomous Underwater Vehicle», Applied Mechanics and Materials, Vols. 799-800, pp. 1001-1005, 2015, doi: http://dx.doi.org/10.4028/www.scientific.net/AMM.799-800.1001
- Гуренко Б.В., Федоренко Р.В. Программный комплекс виртуального моделирования применения автономного необитаемого подводного аппарата (заявка на регистрацию программы для ЭВМ) (рег. № ФИПС №2015660714 от 10.11.2015.)
- Пшихопов В.Х., Гуренко Б.В. Разработка математических моделей подводных аппаратов: учебное пособие. – Таганрог: Изд-во ЮФУ, 2015. – 46 с
- Костюков В.А., Кульченко А.Е., Гуренко Б.В. Процедура исследования параметров модели подвижного подводного объекта // Сб. ст. по материалам XXXVI-XXXVII междунар. науч.-практ. конф. № 11-12 (35). — Новосибирск: Изд. АНС «СибАК», 2015. — с.75-59
- Kostukov, A. Kulchenko, B. Gurenko, «A hydrodynamic calculation procedure for UV using CFD», in proceedings of International Conference on Structural, Mechanical and Materials Engineering (ICSMME 2015), 2015, doi:10.2991/icsmme-15.2015.40
- Gaiduk, B. Gurenko, E. Plaksienko, I. Shapovalov, M. Beresnev, «Development of Algorithms for Control of Motor Boat as Multidimensional Nonlinear Object», MATEC Web of Conferences, Vol. 34, 2015, http://dx.doi.org/10.1051/matecconf/20153404005
- Б.В. Гуренко, И.О. Шаповалов, В.В. Соловьев, М.А. Береснев Построение и исследование подсистемы планирования траектории перемещения для системы управления автономным подводным аппаратом // Инженерный вестник Дона. – 2015. – №4. – url: ivdon.ru/ru/magazine/archive/n4y2015/3383
- Pshikhopov, V.a , Medvedev, M.a , Gurenko, B.b , Beresnev, M.a Basic algorithms of adaptive position-path control systems for mobile units ICCAS 2015 — 2015 15th International Conference on Control, Automation and Systems, Proceedings23 December 2015, Article number 7364878, Pages 54-59 DOI: 10.1109/ICCAS.2015.7364878
- Pshikhopov, M. Medvedev, V. Krukhmalev,V. Shevchenko Base Algorithms of the Direct Adaptive Position-Path Control for Mobile Objects Positioning. Applied Mechanics and Materials Vol. 763 (2015) pp 110-119 © (2015) Trans Tech Publications, Switzerland. doi:10.4028/www.scientific.net/AMM.763.110
- Пшихопов В.Х., Гуренко Б.В., Федоренко Р.В., Программное обеспечение бортовой адаптивной системы управления автономного необитаемого подводного аппарата (Зарегистрировано в Реестре программ для ЭВМ 11 января 2016 г) (рег. № 2016610059 от 11.01.2016)
- Vyacheslav Pshikhopov, Boris Gurenko, Maksim Beresnev, Anatoly Nazarkin IMPLEMENTATION OF UNDERWATER GLIDER AND IDENTIFICATION OF ITS PARAMETERS Jurnal Teknologi Vol 78, No 6-13 DOI: http://dx.doi.org/10.11113/jt.v78.9281
- Fedorenko, B. Gurenko, “Local and Global Motion Planning for Unmanned Surface Vehicle”, MATEC Web of Conferences, Vol. 45, 2016, doi:
Недавно американская компания Leidos совместно с Агентством перспективных оборонных разработок Пентагона испытания робота-тримарана «Си Хантер» проекта ACTUV. Основной задачей аппарата после принятия на вооружение станет охота за подводными лодками противника, но он также будет использоваться для доставки провизии и в разведывательных операциях. Про сухопутных роботов и беспилотники, создаваемых в интересах военно-воздушных сил многие уже наслышаны. Мы же решили разобраться, какими аппаратами в ближайшие несколько лет будут пользоваться военные на море.
Морские роботы могут использоваться для решения самых разных задач, причем их список военные составили далеко не полостью. В частности, командования военно-морских сил многих стран уже определились, что морские роботы могут быть полезны для разведки, картографирования дна, поиска мин, патрулирования входов в морские базы, обнаружения и сопровождения кораблей, охоты на подводные лодки, ретрансляции сигналов, дозаправки самолетов и нанесения ударов по наземным и морским целям. Для выполнения таких заданий сегодня разрабатываются сразу несколько классов морских роботов.
Условно морских роботов можно разделить на четыре большие класса: палубные, надводные, подводные и гибридные. К палубным аппаратам относятся различного рода беспилотники, запускаемые с палубы корабля, надводным - роботы, способные передвигаться по воде, к подводным - автономные корабли, предназначенные для работы под водой. Гибридными морскими роботами принято называть аппараты, способные одинаково эффективно функционировать в нескольких средах, например, в воздухе и на воде или в воздухе и под водой. Надводные и подводные аппараты используются военными, да и не только ими, уже несколько лет.
Патрульными роботами-катерами уже на протяжении последних пяти лет пользуются ВМС Израиля, а подводные роботы, называемые еще автономными необитаемыми подводными аппаратами, входят в состав нескольких десятков военно-морских сил, включая Россию, США, Швецию, Нидерланды, Китай, Японию и обе Кореи. Подводные роботы пока наиболее распространены, поскольку их разработка, производство и эксплуатация относительно просты и значительно просты по сравнению с морскими роботами других классов. Дело в том, что подводные аппараты в большинстве своем «привязаны» к кораблю тросом, кабелем управления и энергоснабжения и не могут уходить от носителя на большие расстояния.
Для полетов палубных беспилотников требуется соблюдение множества непростых условий. Например, управления комбинированным воздушным движением пилотируемых и непилотируемых летательных аппаратов, повышения точности инструментальных средств посадки на колеблющуюся палубу корабля, защиты тонкой электроники от агрессивной среды моря и обеспечения прочности конструкции для посадки на корабль во время сильной качки. Надводные роботы, особенно те, что должны функционировать в районах судоходства и на большом удалении от берега, должны получать сведения о других кораблях и обладать хорошей мореходностью, то есть способностью плавать при сильном волнении моря.
Палубные беспилотники
С середины 2000-х годов американская компания Northrop Grumman по заказу ВМС США демонстратора технологий палубного беспилотного летательного аппарата X-47B UCAS-D. На программу разработки, производства двух экспериментальных аппаратов и проведение их испытаний было потрачено чуть меньше двух миллиардов долларов. Свой первый полет X-47B совершил в 2011 году, а первый взлет с палубы авианосца - в 2013-м. В том же году беспилотник совершил первую автономную посадку на авианосец. Аппарат также проверили на возможность взлетать в паре с пилотируемым самолетом, выполнять полеты в ночное время и дозаправлять другие самолеты.
В целом X-47B использовался военными для оценки потенциальной роли крупных беспилотников на флоте. В частности, речь шла о разведке, нанесении ударов по позициям противника, дозаправке других аппаратов и даже применении лазерного оружия. Длина реактивного X-47B составляет 11,63 метра, высота - 3,1 метра, а размах крыла - 18,93 метра. Беспилотник может развивать скорость до 1035 километров в час и совершать полеты на расстояние до четырех тысяч километров. Он оборудован двумя внутренними бомбовыми отсеками для подвесного вооружения общей массой до двух тонн, хотя на применение ракет или бомб никогда не испытывался.
В начале февраля ВМС США , что ударный палубный беспилотник им не нужен, поскольку с бомбардировкой наземных целей быстрее и качественнее справятся многофункциональные истребители. При этом палубный аппарат все же будет разработан, но заниматься он будет разведкой и дозаправкой истребителей в воздухе. Создание беспилотника будет вестись в рамках проекта CBARS. На вооружении беспилотник получит обозначение MQ-25 Stingray. Победителя конкурса на разработку палубного беспилотника-заправщика назовут в середине 2018 года, а первый серийный аппарат военные рассчитывают получить уже к 2021 году.
При создании X-47B конструкторам пришлось решать несколько задач, самыми простыми из которых была защита аппарата от коррозии во влажном и соленом воздухе и разработка компактной, но прочной конструкции со складным крылом, прочным шасси и посадочным гаком. К крайне сложным задачам относилось маневрирование беспилотника на загруженной палубе авианосца. Этот процесс отчасти автоматизировали, а отчасти перевели в ведение оператора взлета и посадки. Этот человек получил небольшой планшет на руку, при помощи которого, водя пальцем по экрану, он мог управлять перемещением X-47B по палубе до взлета и после посадки.
Для того, чтобы палубный беспилотник мог взлетать с авианосца и садиться на него, корабль нужно было модернизировать, установив на него системы инструментальной посадки. Пилотируемые самолеты садятся по голосовому наведению оператора воздушного движения авианосца, командам оператора посадки и визуальным данным, включая показания оптического курсо-глиссадного индикатора . Для беспилотника все это не годится. Данные для посадки он должен получать в цифровом защищенном виде. Для возможности использования X-47B на авианосцы разработчикам пришлось совместить понятную «человеческую» систему посадки и непонятную «беспилотную».
Между тем, уже сегодня на американских кораблях активно используются беспилотники RQ-21A Blackjack. Они Морской пехоты США. Аппарат оснащен небольшой катапультой, не занимающей много места на палубе корабля. Беспилотник используется для разведки, рекогносцировки и наблюдения. Blackjack имеет в длину 2,5 метра и размах крыла 4,9 метра. Аппарат способен развивать скорость до 138 километров в час и находиться в воздухе до 16 часов. Запуск беспилотника производится при помощи пневматической катапульты, а посадка - при помощи воздушного аэрофинишера. В данном случае - это штанга с тросом, за который аппарат цепляется крылом.

Надводные роботы
В конце июля 2016 года американская компания Leidos совместно с Агентством перспективных оборонных разработок (DARPA) Пентагона ходовые испытания робота - охотника за подлодками «Си Хантер». Его разработка ведется в рамках программы ACTUV. Испытания признали успешными. Аппарат построен по схеме тримарана, то есть судна с тремя параллельными корпусами, соединенными друг с другом в верхней части. Длина дизель-электрического робота составляет 40 метров, а полное водоизмещение - 131,5 тонны. Тримаран может развивать скорость до 27 узлов, а дальность его хода составляет десять тысяч миль.
Испытания «Си Хантера» проводятся с весны прошлого года. Он оснащен различным навигационным оборудованием и сонарами. Основной задачей робота станет обнаружение и преследование подводных лодок, однако робот будет использоваться и для доставки провизии. Кроме того, он будет периодически выводиться и на разведывательные задания. При этом аппарат будет действовать в полностью автономном режиме. Военные намерены использовать таких роботов в первую очередь для поиска «тихих» дизель-электрических подводных лодок. Кстати, по неподтвержденным данным, во время испытаний робот смог обнаружить подлодку на расстоянии полумили от себя.
Конструкция «Си Хантера» при полном водоизмещении предусматривает возможность надежной работы при волнении моря до пяти баллов (высота волны от 2,5 до 5 метров) и выживаемость аппарата при волнении моря до семи баллов (высота волны от шести до девяти метров). Другие технические подробности о надводном роботе засекречены. Его испытания будут проводиться до конца текущего года, после чего робот поступит на вооружение ВМС США. Последние полагают, что роботы, подобные «Си Хантеру» существенно удешевят обнаружение субмарин противника, поскольку не нужно будет использовать дорогостоящие специальные корабли.
Между тем, надводный робот проекта ACTUV станет не первым аппаратом такого класса, используемым военными. На протяжении последних пяти лет на вооружении Израиля стоят роботы - патрульные катера, которые используются для контроля территориальных вод страны. Это небольшие катера, оснащенные сонарами и радиолокационными станциями для обнаружения надводных кораблей и подводных лодок на небольших расстояниях. Катера также вооружены пулеметами калибра 7,62 и 12,7 миллиметра и системами радиоэлектронной борьбы. В 2017 году ВМС Израиля примут на вооружение новые более быстрые патрульные катера-роботы Shomer Hayam («Защитник»).
В начале февраля 2016 года израильская компания Elbit Systems прототип робота Seagull, который будет использоваться для поиска подводных лодок противника и мин. Робот оснащен набором сонаров, которые позволяют ему эффективно обнаруживать крупные и небольшие подводные объекты. Seagull, выполненный в корпусе катера длиной 12 метров, способен автономно работать на протяжении четырех суток, а дальность его действия составляет около ста километров. Он оснащен двумя двигателями, которые позволяют ему развивать скорость до 32 узлов. Seagull может нести полезную нагрузку массой до 2,3 тонны.
При разработке системы поиска подводных лодок и мин Elbit Systems использовала данные о 135 атомных подводных лодках, 315 дизель-электрических подлодках и субмаринах с воздухонезависимыми энергетическими установками, а также нескольких сотнях минисубмарин и подводных аппаратов. 50 процентов кораблей и аппаратов, попавших в базу, не принадлежат странам - членам НАТО. Стоимость одного автономного комплекса оценивается в 220 миллионов долларов. По данным Elbit Systems, два автономных комплекса Seagull при выполнении противолодочных операций могут заменить в составе военно-морских сил один фрегат.
Помимо Израиля надводными роботами располагает и Германия. В середине февраля текущего года немецкие ВМС робота ARCIMS, предназначенного для поиска и обезвреживания мин, обнаружения подводных лодок, ведения радиоэлектронной борьбы и охраны морских баз. Этот автономный катер, разработанный немецкой компанией Atlas ElektroniK имеет в длину 11 метров. Он может нести полезную нагрузку массой до четырех тонн. Катер имеет ударостойкий корпус и небольшую осадку. Благодаря двум двигателям роботизированный комплекс может развивать скорость до 40 узлов.

defenseupdate / Youtube
Подводные роботы
Подводные роботы появились на флоте первыми, практически сразу после начала их использования в исследовательских целях. В 1957 году ученые из Лаборатории прикладной физики Вашингтонского университета впервые использовали подводного робота SPURV для исследования распространения звуков под водой и записи шумов подводных лодок. В 1960 годах в СССР подводных роботов стали использовать для исследования дна. В эти же годы автономные необитаемые подводные аппараты начали поступать на флот. Первые такие роботы имели несколько двигателей для перемещения под водой, простые манипуляторы и телевизионные камеры.
Сегодня подводные роботы используются военными в самых разнообразных операциях: для разведки, поиска и обезвреживания мин, поиска подводных лодок, проверки подводных конструкций, картографирования дна, обеспечения связи между кораблями и подводными лодками и доставки грузов. В октябре 2015 года ВМФ России подводных роботов «Марлин-350», разработанных петербургской компанией «Тетис Про». Роботов военные будут использовать в поисково-спасательных операциях, включая осмотр аварийных подводных лодок, а также для установки гидроакустических маркеров и подъема со дна различных объектов.
Новый подводный робот предназначен для поиска различных объектов и осмотра дна на глубине до 350 метров. Робот оснащен шестью движителями. При длине 84 сантиметра, ширине 59 сантиметров и высоте 37 сантиметров масса «Марлина-350» составляет 50 килограммов. На аппарат можно установить гидролокатор кругового обзора, многолучевой гидролокатор, альтиметр, видеокамеры и приборы освещения, а также различное коммуникационное оборудование. В интересах флота также проходит испытания разведывательный подводный робот «Концепт-М», способный погружаться на глубину до тысячи метров.
В середине марте текущего года Крыловский научный центр на новый способ патрулирования акваторий. Для этого планируется использовать подводных роботов, а для определения точных координат подводных объектов - реактивные гидроакустические буи. Предполагается, что подводный робот будет вести патрулирование по заранее заданному маршруту. В случае, если он засечет какое-либо движение в своей зоне ответственности, он выйдет на связь с ближайшими кораблями или береговой базой. Те, в свою очередь, запустят по району патрулирования реактивные гидроакустические буи (запускаются как ракеты, а попав в воду излучают гидроакустический сигнал, по отражению которого и определяется местонахождение подлодки). Такие буи уже определят точное местоположение обнаруженного объекта.
Между тем, шведская компания Saab новый автономный необитаемый подводный аппарат Sea Wasp, предназначенный для поиска, перемещения и обезвреживания самодельных взрывных устройств. Новый робот создан на базе Seaeye, линейки коммерческих подводных дистанционно управляемых аппаратов. Sea Wasp, оснащенный двумя элекромоторами мощностью пять киловатт каждый, может развивать скорость до восьми узлов. Он также имеет шесть маневровых двигателей мощностью 400 ватт каждый. Для перемещения мин Sea Wasp может использовать манипулятор.
В марте текущего года концерн Boeing крупнотоннажного подводного робота Echo Voyager длиной 15,5 метра. Этот аппарат оснащен системой уклонения от столкновения и может перемещаться под водой полностью автономно: специальные сонары отвечают за обнаружение препятствий, а компьютер просчитывает маршрут уклонения. Echo Voyager получил перезаряжаемую энергетическую систему, подробности о которой не уточняется. Робот может собирать различные данные, включая картографирования дна, и передавать их оператору. Для обслуживания Echo Voyager не требуется специального корабля поддержки, как для других подводных роботов.

Christopher P. Cavas / Defense News
Гибридные роботы
Морские роботы, способные работать в нескольких средах, стали появляться относительно недавно. Считается, что благодаря таким аппаратам военные смогут сэкономить свои бюджеты, поскольку не нужно будет раскошеливаться на разных роботов, способных, скажем летать и плавать, а купить вместо них одного, умеющего делать и то, и другое. Последние четыре года Школа повышения квалификации офицерских кадров ВМС США занимается квадрокоптера Aqua-Quad, способного садиться на воду и взлетать с нее. Аппарат работает на солнечной энергии и использует ее для подзарядки аккумуляторов. Дрона можно оснастить гидроакустической системой, способной обнаруживать подводные лодки.
Разработка Aqua-Quad пока еще не завершена. Первые пробные испытания аппарата состоялись осенью прошлого года. Дрон построен по четырехлучевой схеме с расположением на концах лучей электромоторов с воздушными винтами. Эти винты диаметром 360 миллиметров каждый забраны в обтекатели. Кроме того, весь аппарат также заключен в тонкое кольцо диаметром один метр. Между лучами расположены 20 солнечных панелей. Масса аппарата составляет около трех килограммов. Беспилотник оснащен аккумулятором, используя энергию которого он и совершает полеты. Продолжительность полета Aqua-Quad составляет около 25 минут.
В свою очередь Научно-исследовательская лаборатория ВМС США занимается созданием двух типов беспилотников - Blackwing и Sea Robin. Аппараты проходят испытания с 2013 года. Эти беспилотники примечательны тем, что их можно запускать с подводных лодок. Они помещаются в специальные контейнеры для стандартного торпедного аппарата калибра 533 миллиметра. После запуска и всплытия контейнер раскрывается, а беспилотник взлетает вертикально. После этого он может вести разведку морской поверхности, передавая данные в режиме реального времени, или выступать ретранслятором сигналов. Отработав, такие беспилотники будут садиться на воду или «отлавливаться» воздушными аэрофинишерами кораблей.
В феврале текущего года сингапурская компания ST Engineering беспилотный летательный аппарат самолетного типа, способный летать, садиться на воду и даже плавать под водой. Этот беспилотник, способный эффективно работать в двух средах, получил название UHV (Unmanned Hybrid Vehicle, беспилотный гибридный аппарат). Масса UHV составляет 25 килограммов. Он может находиться в воздухе до 20-25 минут. UHV имеет один воздушный винт и два водяных гребных винта. При посадке на водную поверхность лопасти воздушного винта складываются и для движения беспилотника используются уже водяные движители.
В подводном режиме UHV может перемещаться со скоростью до четырех-пяти узлов. За перевод систем управления из одной среды в другую полностью отвечает бортовой компьютер беспилотника. Разработчики полагают, что аппарат пригодится военным для ведения разведки и поиска подводных мин. Похожий проект в прошлом году Центр беспилотных систем Технологического института Джорджии. Он разработал двухсредный квадрокоптер GTQ-Cormorant. Дрон способен погружаться на заданную глубину и плавать под водой, используя в качестве движителей воздушные винты. Проект финансируется Научно-исследовательским управлением ВМС США.
А вот DARPA занимается разработкой особых гибридных роботов, которые будут использоваться военными в качестве схронов. Предполагается, что такие аппараты, разработка которых ведется с 2013 года, нагруженные топливом, боеприпасами или малыми разведывательными беспилотниками, будут выпускаться с корабля и уходить на дно. Там они будут переключаться в спящий режим, в котором смогут функционировать несколько лет. При необходимости корабль сможет с поверхности послать на дно акустический сигнал, который разбудит робота и тот поднимется на поверхность, подплывет к кораблю и моряки смогут забрать с него свою заначку.
Подводные хранилища должны будут выдерживать давление более 40 мегапаскалей, поскольку устанавливать их военные планируют на больших глубинах, где они будут недоступны ни для дайверов-любителей, ни для подводных лодок потенциального противника. В частности, глубина установки хранилищ будет достигать четырех километров. Для сравнения, стратегические подлодки могут погружаться на глубину 400-500 метров. Технические подробности о гибридных роботах-схронах засекречены. Как ожидается, первые такие аппараты американские военные получат на испытания во второй половине 2017 года.
Рассказать обо всех морских роботах, уже принятых на вооружение и еще только разрабатываемых, в рамках одного материала невозможно - каждый класс таких аппаратов уже насчитывает по меньше мере десяток разных названий. Помимо военных морских роботов активно развиваются и гражданские аппараты, которые разработчики намерены использовать в самых разных целях: от перевозки пассажиров и грузов до мониторинга погоды и изучения ураганов, от подводных исследований и контроля линий связи до ликвидации последствий техногенных катастроф и спасения пассажиров аварийных судов. На море роботам всегда найдется работа.

Василий Сычёв
Список сокращений.
Введение.
1. Вопросы терминологии и классификации.
2. Исторический экскурс.
2.1. Развитие МРТ за рубежом.
2.2. Развитие отечественной МРТ.
3. Особенности и перспективы применяемых технологий.
3.1. Связь и взаимодействие.
3.2. Навигация.
3.3. Движители.
4. Применение МРТ в военных целях.
5. Применение МРТ при работах на шельфе.
6. Беспроводные сенсорные сети и их применение в море.
7. Сообщества взаимодействующих роботов
8. Морская робототехника + дополненная реальность.
Заключение.
Литература.
Приложения. Приложение 1. «Каталог отечественных и зарубежных ТНПА». Приложение 2. «Каталог отечественных и зарубежных АНПА».
Список сокращений.
АНПА – автономный необитаемый подводный аппарат
ТНПА – телеуправляемый необитаемый подводный аппарат
ИНС – инерциальная навигационная система
ГАНС – гидроакустическая навигационная система
ГАНС ДБ – ГАНС с длинной базой
ГАНС КБ – ГАНС с короткой базой
ГАНС УКБ – ГАНС с ультракороткой базой
НПА – необитаемый подводный аппарат
ППА – приемо-передающая антенна
ОПА – обитаемый подводный аппарат
AR (augmented reality) – дополненная реальность
AUV (autonomous underwater vehicle) – автономный подводный аппарат
ROV (remotely operated vehicle) – дистанционно управляемый аппарат (двигающийся)
SAUV (sun autonomous underwater vehicle) – АНПА на солнечной батарее
UUV (Unmanned Underwater Vehicle) – необитаемый подводный аппарат
USV (Unmanned Surface Vehicle) – необитаемый надводный аппарат
UXV (Unmanned Generic Vehicle) – необитаемый аппарат общего (любого) класса
Введение
Если в детстве вы потеряли иголку в стоге сена, то найдете ее, в лучшем случае, к моменту выхода на пенсию. Но если на решение этой задачи мобилизовать обитателей ближайшего муравейника, то иглу вам принесут через две минуты. Проверено не раз. Если же с муравьями договориться не удалось, то можно привлечь студентов технического вуза, увлеченных робототехникой. Им вполне по силам создать группу миниатюрных устройств, оснащенных магнитными датчиками, способных передвигаться и взаимодействовать друг с другом. Создание роботов, способных взаимодействовать друг с другом в целях наиболее эффективного решения поставленной задачи - это новое направление в развитии робототехники, названное «стайные роботы», апологеты которого обещают прямо таки революцию в решении множества трудоемких задач. О стайных роботах речь пойдет в предпоследней главе нашего обзора. Кстати, если стайных роботов лишить возможности передвигаться, то мы перейдем к другой, тоже перспективной, но предшествующей им по времени, научно-практической теме - к теме беспроводных сенсорных сетей.
На этом направлении уже достигнуты интересные практические результаты. Принципы построения и примеры реализации сетей мы представим в 6-й главе обзора.
Тем временем, пора вспомнить, что наш обзор посвящен применению робототехники именно в море, а не на суше или в поднебесье, т.е. придется представить себе поиск иголки не в стоге сена, а на плантации водорослей, что покажется задачей более трудоемкой. В воде практически не работает Wi-Fi, крайне затруднено распространение электромагнитных волн, сложно использовать оптический канал, т.е. вопросы связи, взаимодействия, навигации, наблюдения и пр. приобретают свою, сугубо морскую специфику. Особенностям реализации связи, взаимодействия, навигации, движителей, сенсоров и манипуляторов в морских роботах посвящена 3-я глава обзора.
Современные робототехнические системы находят применение практически во всех областях подводно-технических работ. Однако главными сферами их применения являются: военная, работы по добыче и транспортировке топливно-сырьевых ресурсов, поисково-спасательные работы и океанологические исследования. С особенностями их использования в этих областях и примерами применения можно ознакомиться в 4 – 5 главах обзора. Именно в этих областях в последние годы достигнут наибольший прогресс в части применения новых технологий связи и навигации подводных аппаратов, оснащения новыми датчиками и манипуляторами, повышения эффективности управления и технического обслуживания. В Приложении представлен каталог современных ТНПА и АНПА.
Так почему же мы не видим на полях страны роботов, ищущих иглы в стогах? Да потому, что никто не ставил перед ними таких задач. Видимо иглы перестали теряться. А если говорить серьезно, то постановка задач, выработка сценариев по использованию робототехники в решении практических проблем, в том числе и с учетом перспектив развития этого направления, является важнейшей организационной задачей. Недаром, в планах Пентагона на ближайшие годы проектам по выработке концепций применения робототехники в армии придается такая же важность, как и проектам по разработке самих роботов. Более того, они имеют приоритет, так как способны придать стимул и определить направление проектирования роботизированных систем. Свои предложения по этому вопросу и другим проблемам развития морской робототехники (МРТ) в России мы представим в Заключении к данному обзору.
Освоение глубин Мирового океана – задача не менее сложная и опасная, чем освоение космического пространства. А по экономической и экологической важности даже более приоритетная. В решении этой задачи морская робототехника призвана играть роль не просто помощника человека, а полноправного участника, так как должна не просто сделать глубины океана более доступными и безопасными для человека, но взвалить на свои плечи основной объем работ по их изучению и освоению.
1. Вопросы терминологии и классификации.
В области морской робототехники пока не выработано единой общепризнанной терминологии. Некоторые специалисты используют словосочетания, где базовым является слово «робот», например: морские роботы, морская робототехника, робототехнические комплексы или системы и пр. Другие стремятся обойтись без термина «робот», упирая на более этимологически внятные словосочетания, например «необитаемый подводный аппарат» (НПА). В данном обзоре мы будем придерживаться терминологии, вышедшей из трудов М.Д Агеева и его коллег по Институту проблем морских технологий ДВО РАН, который он возглавлял с 1988 по 2005г., отдавая дань их вкладу в развитие отечественной морской робототехники. Это такие термины, как «необитаемый подводный аппарат» (НПА), «телеуправляемый необитаемый подводный аппарат» (ТНПА), «автономный необитаемый подводный аппарат» (АНПА) и ряд других. Вместе с тем, в тексте вы встретите и всевозможные «роботизированные» термины, дабы не искажать идей и выводов авторов, использовавших их в своих работах. Как бы там ни было, мы не видим здесь большого противоречия, ведь НПА – это всего лишь аппарат, работающий под водой (или на поверхности моря, или даже над водной гладью – морской беспилотник), а роботизированный комплекс или система – это уже и судно поддержки и м.б. система навигационных маяков, без которых аппарат не может обойтись для выполнения своей миссии. Так что разнообразие в терминологии, мы надеемся, никого не введет в смущение. Все должно быть ясно из контекста.
В зарубежных источниках по данной теме также не наблюдается единообразия. Чаще других используется термин ROV (remotely operated vehicle) – дистанционно управляемый аппарат (двигающийся) или вместо vehicle – vessel, т.е. судно. Используются также такие аббревиатуры, как UUV (Unmanned Underwater Vehicle) – необитаемый подводный аппарат, USV (Unmanned Surface Vehicle) – необитаемый надводный аппарат, UXV (Unmanned Generic Vehicle) – необитаемый аппарат общего (любого) класса и пр. При этом авторами допускается весьма вольное толкование этих терминов, особенно ROV. Встречаются и другие, близкие по семантике, термины и аббревиатуры, на которых мы не будем сейчас заострять внимание. В любом случае вы всегда сможете воспользоваться разделом «Список сокращений» данного обзора.
Классификация.
Классификация в любом научном направлении является концептуальным вопросом как в части взаимодействия специалистов, так и в плане развития этого направления. Разнообразие созданных в мире НПА затрудняет их строгую классификацию. Тем не менее, предложены некоторые классификационные схемы, на которые можно опираться.
Во-первых, общеизвестно разделение подводных аппаратов на обитаемые и необитаемые – ОПА и НПА. Обитаемые аппараты могут быть гипербарическими и нормобарическими (прочный корпус защищает гидронавтов от давления воды). Далее эти две подгруппы делятся на автономные и привязные.
Необитаемые аппараты, в первую очередь разделяются на телеуправляемые и автономные.
Чаще всего в качестве классификационных признаков морских РТК (НПА) используют массу, габариты, автономность, способ передвижения, наличие плавучести, рабочую глубину, схему развертывания, назначение, функциональные и конструктивные особенности, стоимость и некоторые другие .
Классификация по массогабаритным характеристикам:
- - микроПА (ПМА), масса (сухая) - мини-ПА, масса 20–100 кг, дальность плавания от 0,5 до 4000 морских миль, оперативная глубина до 2000 м;
- - малые НПА, масса 100–500 кг. В настоящее время ПА этого класса составляют 15–20 % и находят широкое применение при решении различных задач на глубинах до 1500 м;
- - средние НПА, масса более 500 кг, но менее 2000 кг;
- - большие НПА, масса > 2000 кг.
Классификация по особенностям формы несущей конструкции:
- - классической формы (цилиндрической, конической и сферической);
- - бионические (плавающего и ползающего типов);
- - планерной (самолетной) формы;
- - с солнечной панелью на верхней части корпуса (плоские формы);
- - ползающие НПА на гусеничной базе;
- - змеевидной формы.
Классификация морских РТК (НПА) по степени автономности.
АНПА должен отвечать трем основным условиям автономности: механической, энергетической и информационной.
Механическая автономность предполагает отсутствие какой-либо механической связи в виде кабеля, троса или шланга, связывающих ПА с судном-носителем либо с донной станцией или береговой базой.
Энергетическая автономность предполагает наличие на борту ПА источника питания в виде, например, аккумуляторных батарей, топливных элементов, ядерного реактора, двигателя внутреннего сгорания с замкнутым рабочим циклом и т. п.
Информационная автономность НПА предполагает отсутствие информационного обмена между аппаратом и судном-носителем, либо донной станцией или береговой базой. При этом НПА должен иметь и автономную инерциальную навигационную систему.
Классификация морских РТК (НПА) по информационному принципу для соответствующего поколения НПА.
Морские автономные РТК ВН (АНПА) первого поколения функционируют по заранее заданной жесткой неизменяемой программе. Дистанционно управляемые (ДУ) НПА первого поколения управляются по разомкнутому контуру. В этих простейших устройствах команды управления подаются непосредственно в движительный комплекс без использования автоматических обратных связей.
АНПА второго поколения имеют разветвленную сенсорную систему. Второе поколение ДУНПА предполагает наличие автоматических обратных связей по координатам состояния объекта управления: высоте над дном, глубине погружения, скорости, угловым координатам и т. п. Эти очередные координаты сравниваются в автопилоте с заданными, определяемыми оператором.
АНПА третьего поколения будут обладать элементами искусственного интеллекта: возможностью самостоятельного принятия несложных решений в рамках общей поставленной перед ними задачи; элементами скусственного зрения с возможностью автоматического распознавания простых образов; возможностью к элементарному самообучению с пополнением собственной базы знаний. ДУНПА третьего поколения управляются оператором в интерактивном режиме. Система супервизорного управления предполагает уже некую иерархию, состоящую из верхнего уровня, реализуемого в ЭВМ судна-носителя, и нижнего уровня, реализуемого на борту подводного модуля.
В зависимости от глубины погружения обычно рассматривают: мелководные НПА с рабочей глубиной погружения до 100 м, НПА для работ на шельфе (300–600 м), аппараты средних глубин (до 2000 м) и НПА больших и предельных глубин (6000 м и более).
В зависимости от типа движительной установки можно различать НПА с традиционной винторулевой группой, НПА с движительной установкой на бионических принципах, с водометными движителями и АНПА – планеры с движительной системой, использующей изменение дифферента и плавучести . В свою очередь, винторулевые НПА разделяются на электрические и электрогидравлические. Особенности различных движителей рассмотрены в разделе 3.3.
Кроме того в ряде работ НПА разделяют на осмотровые и рабочие. В первую очередь это относится к ТНПА. Под осмотровыми ТНПА подразумевают легкие и средние аппараты, предназначенные для осмотра, подводной съемки, исследований с помощью различных датчиков, а под рабочими – тяжелые, весом до нескольких тонн, ТНПА, предназначенные для выполнения работ с помощью манипуляторов и различных инструментов, а также для подъема грузов. В работе приводится следующая классификационная таблица ТНПА.
В этой классификации никак не отражены новые веяния в части бесконтактных сенсорных сетей («умный планктон») и стайных роботов, но это, видимо, дело ближайшего будущего. Когда появятся примеры воплощения этих технологий в реальных морских проектах, тогда и классификация сумеет подстроиться.
В настоящем обзоре мы в равной степени уделяем внимание ТНПА и АНПА. У каждого из этих видов морской робототехники есть своя специфическая сфера применения, что напрямую связано с характерными для каждого вида достоинствами и недостатками. Главное достоинство ТНПА в том, что он связан кабелем с судном поддержки, т.е. энергетически и информационно полностью обеспечен. Он может работать под водой сколь угодно долго, оперативно управляться оператором с борта несущего судна, и нести на себе большой груз – инструменты, мощные манипуляторы, осветительную аппаратуру. По сути ТНПА можно отнести к робототехнике только с большой натяжкой, скорее, это дистанционно управляемый инструментальный комплекс. ТНПА выполняют наибольший объем осмотрово-поисковых, спасательных, ремонтных и строительных работ. Вместе с тем, жесткая привязка к судну-носителю является и главным недостатком ТНПА, не позволяющим им выполнять функции, связанные с автономной работой, например, скрытная разведка, диверсии, проникновение в пространства, где внешний кабель стал бы помехой. Да и сеть датчиков или подвижных аппаратов для работы на больших площадях из ТНПА не построишь. Поэтому и у АНПА есть своя довольно обширная сфера деятельности. К сожалению, у АНПА есть, как минимум два серьезных недостатка. Это подводная связь и ограниченный энергетический ресурс, да и подводная навигация оставляет желать лучшего. Научные работы по решению этих проблем ведутся достаточно активно, о чем будет рассказано в соответствующих разделах обзора, и если они принесут практические результаты, то это придаст мощный дополнительный стимул развитию морской робототехнике.
2. Исторический экскурс.
2.1. Развитие МРТ за рубежом.
Началом производства и использования необитаемых подводных аппаратов за рубежом можно считать конец 50-х, начало 60-х годов прошлого века, когда ВМС США всерьез взялись за развитие данного направления.
Так в начале 60-х годов была создана очень удачная модель ТНПА, которую можно считать прообразом всех современных привязных подводных аппаратов. Аппарат назывался Cable-Controlled Underwater Research Vehicle (CURV) и имел трубчатую раму с четырьмя торпедообразными плавучестями и общей длиной 3,3 м, шириной и высотой по 1,2 м. Движительный комплекс состоял из трех двигателей мощностью по 10 л.с. На борту находились: гидролокатор и гидрофон, ТВ-камера и светильники, а также фотокамера под пленку 35 мм. CURV был оборудован 7-функциональным манипулятором со схватом, позволяющим захватить крупные предметы цилиндрической формы. Все приводы, в том числе и двигателей, были гидравлическими . Глубина погружения CURV составляла 600 м. В последствии были созданы модификации CURV II и CURV III с глубиной погружения до 6000 м. CURV и его модификации подняли со дна сотни торпед, участвовали в поисково-спасательных операциях. Одна из таких операция состояла в поиске и подъеме водородной бомбы с глубины 869 м в районе Паломареса (Испания) в 1966г.
В 70-е годы к созданию необитаемых подводных аппаратов активно подключились Великобритания и Франция, а с конца 70-х и особенно в 80-е годы в гонку активно включились Германия, Норвегия, Канада, Япония, Голландия, Швеция. И если изначально производство НПА финансировалось государством, а использование ограничивалось, в основном, военной сферой, то уже в 80-е годы основной объем их производства стал приходиться на коммерческие компании, а сфера применения распространилась в область бизнеса и науки. Это было связано, в первую очередь, с интенсивным освоением шельфовых месторождений нефти и газа.
В 90-е годы НПА перешли барьер глубины в 6000 м. Японский ТНПА JAMSTEC Kaiko достиг в Марианской впадине глубины 10 909 м. В 2008г. военно-морской флот США начал замену спасательных систем, управляемых пилотом, на модульные системы, основанные на необитаемых дистанционно управляемых аппаратах.
Появление на рынке большого разнообразия моделей НПА привело к активному поиску новых сфер их применения, а это, в свою очередь, нашло отклик со стороны разработчиков и производителей НПА. Такой взаимообразный процесс, стимулирующий развитие данного направления, происходит и сейчас. В настоящее время на зарубежном рынке морской робототехники функционирует более 500 компаний-производителей НПА из самых разных стран, включая даже такие, как Исландия, Иран и Хорватия.
2.2. Развитие отечественной МРТ.
В нашей стране создание необитаемых подводных аппаратов началось примерно в те же годы, что и за рубежом. В Институте океанологии в 1963г. началась разработка, а в 1968г. появились ТНПА «КРАБ» и «Манта 0,2», оснащенные телекамерой и манипулятором.
Существенный вклад в развитие морской робототехники в разное время внесли такие организации, как:
- - Институт проблем морских технологий ДВО РАН (ИПМТ ДВО РАН);
- - Институт океанологии РАН им. Ширшова;
- - МВТУ им. Баумана;
- - Институт механики МГУ;
- - ЦНИИ «Гидроприбор»;
- - Ленинградский политехнический институт;
- - Инженерный центр «Глубина»;
- - ЗАО «Интершельф-СТМ»;
- - ГНЦ «Южморгеология»;
- - ООО «Индэл-Партнер»;
- - ФГУП «ОКБ Океанологической техники РАН».
В настоящее время активно работает на российском рынке ОАО «Тетис Про», предоставляющее российским потребителям продукцию ведущих зарубежных производителей, осуществляющее их локализацию и техническую поддержку.
Институт проблем морских технологий ДВО РАН был создан в 1988г. на базе отдела подводных технических средств ИАПУ ДВНЦ АН СССР.
В разное время в институте были созданы АНПА «Скат», «Скат-гео», «Л-1», «Л-2», «МТ-88», «Тифлонус», «ОКРО-6000», «CR-01А», «Клавесин», малогабаритный «Пилигрим», АНПА на солнечных батареях (САНПА); ТНПА серии «МАКС» (малогабаритный аппарат с кабельной связью). Всего за период 1974-2010гг. было создано более 20 необитаемых подводных аппаратов различного назначения.
Аппараты, созданные в институте, использовались в спасательных операциях, для поиска затонувших объектов, обследования подводных сооружений: трубопроводов, опор платформ и причальных сооружений. Уникальная операция в Саргасовом море по поиску и обследованию атомной ПЛ «К-219», затонувшей в 1987г. на глубине 5500 м, была первой в мире глубоководной операцией, осуществленной исключительно автономным необитаемым подводным аппаратом («Л-2»). Созданный робототехнический комплекс использовался для обследования района гибели АПЛ "К-8" в северной Атлантике и при поиске пассажирского южно-корейского самолета в районе о. Сахалин. В 1989 г. аппарат "Л-2" участвовал в проведении поисково-спасательных работ в Норвежском море в районе аварии АПЛ "К-287" ("Комсомолец").
В 1990г. АНПА «МТ-88» получил в Сан-Диего (США) международный диплом INTERVENTION/ROV"90 первой степени за лучшую работу года и вклад в прогресс мировой подводной робототехники.
В институте океанологии , как уже было сказано выше были созданы первые отечественные ТНПА серий «КРАБ» и «Манта».
В МВТУ им. Баумана исследования по созданию подводной техники начались еще в конце 60-х годов на кафедре СМ-7. И по сей день кафедры «Океанотехника» и «Подводные роботы и аппараты» готовят специалистов по разработке подводных аппаратов. В инженерном центре «Глубина» совместно с преподавателями и студентами кафедры «Подводные роботы и аппараты» был создан многофункциональный ТНПА «Калан». Кстати, Инженерный центр «Глубина» в начале 90-х разработал еще один малогабаритный осмотровый ТНПА «Белёк».
ЦНИИ «Гидроприбор» отметился разработкой ТНПА «ТПА-150», «ТПА-200» и «Рапан». Однако, в процессе эксплуатации в «Рапане» был выявлен ряд недостатков и его использование было прекращено.
В 1990г. на рынке появилась ленинградская фирма ЗАО «Интершельф-СТМ» со своими разработками ТНПА, которыми в последствии были оснащены суда «Экопатруль». В 1998г. эта организация по заказу компании Exxon выполнила работы по исследованию больших участков дна в рамках проекта разработки шельфовых нефтегазовых месторождений.
ГНЦ «Южморгеология» базируется на побережье Черного моря, в 40 км от Новороссийска. Эта организация является разработчиком и обладателем трех ТНПА «RT-1000 PLI», «PTM 500» и «PT 6000M».
С помощью этих аппаратов был выполнен целый ряд подводно-технических работ: поиск захоронений химического и бактериологического оружия в Балтийском море, осмотр нефтяных трубопроводов, осмотр выпускных коллекторов очистных сооружений и пирсовых сооружений порта в Черном море, работа на затонувших объектах - «Адмирал Нахимов» и АПРК «Курск», осмотр прибрежной части подводного трубопровода «Голубой поток», поиск и подъем черных ящиков аэробуса А-320, потерпевшего катастрофу под г.Сочи и ряд других работ.
ООО «Индэл-Партнер» , образованное в 2001г. хорошо известно, благодаря своим миниатюрным и недорогим (3-7 тыс. долл.) ТНПА осмотрового класса серий ГНОМ и «Обзор». Эти аппараты широко используются для подводных съемок, наблюдения за рыбами и обитателями дна, осмотра затонувших судов и поиска различных объектов. ГНОМы закуплены и успешно эксплуатируются службами МЧС РФ, Генпрокуратуры РФ, Росэнергоатома, крупными нефтяными и газовыми компаниями, водолазами и дайверами.
ФГУП «ОКБ Океанологической техники РАН» - еще один известный производитель разнообразной подводной техники, в 2006г. разработал и произвел многоцелевой ТНПА рабочего класса ROSUB 6000 с глубиной погружения до 6000 м. Вес аппарата -2500 кг, полезная нагрузка -150 кг.
ОАО «Тетис Про» . В 2010 году спасательные силы Черноморского флота России приняли на вооружение новый телеуправляемый автономный необитаемый подводный аппарат "Обзор-600", созданный российской компанией "Тетис-ПРО". Ранее российский флот использовал АНПА британского производства. Речь идет об аппаратах Tiger и Pantera+ производства компании Seaeye Marine. "Обзор-600" относится к классу малых АНПА и способен работать на глубине до 600 метров. Масса аппарата составляет 15 килограммов. "Обзор-600" оснащен манипуляторами, которые позволяют осуществлять захват груза массой до 20 килограммов. Благодаря небольшим размерам, АНПА может проникать в сложные или узкие конструкции под водой.
3. Особенности и перспективы применяемых технологий.
3.1. Связь и взаимодействие.
Очевидно, что в данном разделе речь пойдет исключительно о связи и взаимодействии автономных подводных аппаратов (АНПА), т.к. ТНПА связаны с судном поддержки по кабелю, а поверхностные аппараты - по радиоканалу. В связи с тем, что электромагнитные волны в воде быстро затухают, связь по радиоканалу в диапазоне КВ и УКВ возможна частично только на перископной глубине. Подводным роботам, призванным к работе на глубине это не интересно. Исследования, проводившиеся, в первую очередь, в интересах военного подводного флота, показали, что из известных в природе физических полей наибольший интерес для решения проблемы связи с подводными объектами представляют:
- - акустические волны;
- - электромагнитные поля в диапазоне сверхнизких (СНЧ) и крайне низких частот (КНЧ), иногда их именуют чрезвычайно низкими частотами (ЧНЧ);
- - сейсмические волны;
- - оптическое (лазерное) излучение (в сине-зеленом диапазоне);
- - нейтринные пучки и гравитационные поля.
Было решено, что резервная связь с ПЛ, находящимися под водой в любой точке мирового океана наиболее реальна с помощью антенн, излучающих сверхдлинные волны . Были построены многокилометровые антенны в США, в районе Великих озер и у нас на Кольском полуострове.
В диапазоне КНЧ возможна односторонняя посылка сообщения и его прием в любой точке океана, но … одного короткого слова в течение … 5-20 минут. Понятно, что такая односторонняя связь может использоваться только как резервная, для передачи, например, экстренной команды «всплыть и связаться с центром любым доступным образом».
Поэтому на сегодняшний день единственным способом связи НПА с поверхностью или с другими подводными аппаратами является акустическая связь в низкочастотном диапазоне. В качестве примера можно привести акустический приёмо/передающий модем LinkQuest UWM 4000 для подводной связи фирмы LinkQuest.
На сегодняшний день это одно из наиболее совершенных и востребованных изделий, благодаря: усовершенствованной схеме модуляции для улучшения отношения сигнал-шум; стабилизации канала связи для борьбы с множественным переотражением сигнала; кодированию с коррекцией ошибок; автоматической адаптации скорости передачи для борьбы с изменяющейся шумовой обстановкой в окружающей среде.
Однако, и на такой скорости невозможно передавать значительные объемы информации. Можно только передавать команды или обмениваться небольшими файлами. Чтобы передать фото- или видеоизображение, или перекачать в центр обработки массив накопленных данных, АНПА необходимо всплыть и воспользоваться радио или спутниковой связью. Для этого на борту большинства современных аппаратов (кроме специализированных донных сетевых датчиков) имеются необходимые средства связи.
Так, например, в АНПА Gavia модуль связи и управления обладает следующими возможностями:
- - беспроводная локальная вычислительная сеть
- (Wi-Fi IEEE 802.11g) дальность действия - 300м (оптимальная дальность - 150 м);
- - спутниковая связь: Iridium;
- - гидроакустическая система связи для получения статусных сообщений системы, дальность действия - 1200 м;
- - извлечение данных: проводная локальная вычислительная сеть (Ethernet) или беспроводная локальная вычислительная Wi-Fi.
Подводная оптическая связь.
По сравнению с воздухом, вода непрозрачна для большей части спектра электромагнитных волн, за исключением видимого диапазона. Более того, в самых чистых водах свет проникает вглубь лишь на несколько сотен метров. Поэтому в настоящее время под водой используется акустическая связь. Акустические системы передают информацию на достаточно большие расстояния, но все же отстают по времени передачи из-за относительно малой скорости распространения звука в воде.
Ученые и инженеры из Woods Hole Oceanographic Institution (WHOI) разработали оптическую систему передачи информации, которая компонуется с уже существующей акустической системой. Такой способ позволит передавать данные со скоростью до 10-20 мегабит в секунду на расстояние 100 метров, используя маломощную батарею и недорогие приемник и передатчик. Изобретение позволит подводным аппаратам, оборудованным всеми необходимыми для этого устройствами, передавать на поверхность воды мгновенные сообщения и видео в режиме реального времени. Отчет компании был представлен 23 февраля 2010 года на собрании Ocean Sciences Meeting в Портленде (Portland Ore). Когда же судно уходит на такую глубину, когда оптическая система уже не работает, вступает акустика.
Материал о результатах испытаний этой технологии появился на сайте WHOI только в июле 2012 года. Видимо, создатели так долго решали какие-то коммерческие вопросы или вопросы авторских прав. Сообщалось, что в оптическом модеме использовался голубой свет, т.к. другие световые волны хуже распространяются в воде, и была осуществлена передача видео изображения со дна моря в режиме, «близком к реальному времени», на расстояние до 200 метров. Также сообщалось, что создатели технологии образовали альянс с компанией Sonardyne для коммерческого продвижения своего продукта, который назвали BlueComm .
Для справки приведем основные базовые сведения по беспроводной оптической связи в воздухе.
Технология беспроводной оптики (Free Space Optics-- FSO) известна достаточно давно: первые эксперименты по передаче данных с помощью беспроводных оптических устройств были проведены более 30 лет назад. Однако ее быстрое развитие началось с начала 1990-х гг. с появлением широкополосных сетей передачи данных. Первые системы производства компаний A.T.Schindler, Jolt и SilCom обеспечивали передачу данных на расстояния до 500 м и использовали инфракрасные полупроводниковые диоды. Прогресс подобных систем сдерживался в основном из-за отсутствия надежных, мощных и "скорострельных" источников излучения.
В настоящее время такие источники появились. Современная технология FSO поддерживает соединения до уровня ОС-48 (2,5 Гбит/c) с максимальной дальностью до 10 км, а некоторые производители заявляют о скорости передачи данных до 10 Гбит/с и расстояниях до 50 км. При этом на показатель реальной максимальной дальности оказывает влияние доступности канала, то есть процента времени, когда канал работает.
Скорости передачи данных, обеспечиваемые системами FSO, примерно такие же, как и у волоконно-оптических сетей, поэтому они наиболее востребованы в широкополосных приложениях на участке "последней мили". Беспроводные оптические системы используют диапазон инфракрасного излучения от 400 до 1400 нм.
Идеология построения систем беспроводной оптики основана на том, что оптический канал связи имитирует отрезок кабеля. Такой подход не требует дополнительных протоколов связи или их модификации
Оптическим системам присущи определенные характеристики, которые делают их довольно востребованными на рынке:
- хорошая защищенность канала от несанкционированного доступа. Несанкционированный съем передаваемой информации возможен только тогда, когда приемник сигнала размещается непосредственно перед передатчиком, что неизбежно приводит к перерывам связи в основном канале и регистрации такой попытки. Оптические системы можно использовать при организации канала для приложений, требующих высокого уровня безопасности (в военные целях, в банковской сфере и.т.д.);
- значительные информационные емкости каналов (до десятков Гбит/с) обеспечивают возможность устойчивого криптографирования с высоким уровнем избыточности;
- высокая помехозащищенность канала. В отличие от радиоустройств и модемов для выделенных линий оптические системы не восприимчивы к помехам и электромагнитному шуму; для организации канала не требуется получение разрешений на частоту, что существенно удешевляет и ускоряет создание сети. Для применения таких устройств достаточно гигиенического сертификата, а в случае их использования в сетях общего пользования -- еще и сертификата системы "Электросвязь".
Построение всех инфракрасных систем передачи практически одинаково: они состоят из интерфейсного модуля, модулятора излучателя, оптических систем передатчика и приемника, демодулятора приемника и интерфейсного блока приемника. В зависимости от типа используемых оптических излучателей различают лазерные и полупроводниковые инфракрасные диодные системы, имеющие разные скорости и дальность передачи. Первые обеспечивают дальность передачи до 15 км со скоростями до 155 Мбит/с (коммерческие системы) или до 10 Гбит/с (опытные системы). Следует отметить, что с ужесточением требований к качеству канала дальность связи снижается. Вторые обеспечивают существенно меньшую дальность передачи, хотя по мере развития технологии дальность и скорость связи возрастают. .
3.2. Средства навигации.
История морской навигации уходит в глубь веков. Еще древние мореплаватели ориентировались по береговым маркерам, а вдали от берега - по звездам. Да, так можно найти путь домой, но для поисковых работ, где требуется точное позиционирование как объекта поиска на дне моря, так и своих собственных координат под водой, нужны принципиально иные методы навигации. Несмотря на технический прогресс, еще совсем недавно, полвека назад, средства навигации не обеспечивали необходимой точности позиционирования под водой. Из воспоминаний американских специалистов - поисковиков известно о трудностях, с которыми они столкнулись в 1963 году, когда на глубине 2560 м. затонула американская подлодка «Трешер», а в 1966 году у берегов Испании была потеряна водородная бомба. Точность подводного позиционирования не могла обеспечить точного повторного выхода к затонувшему объекту. Именно эти и подобные им инциденты привели к активному исследованию и разработке методов гидроакустического позиционирования. В дальнейшем, появление спутниковых навигационных систем еще больше усилили возможности навигации на море.
В настоящее время навигационные комплексы НПА включают:
- - спутниковые системы;
- - гидроакустические;
- - бортовые автономные.
Спутниковые навигационные системы ГЛОНАСС и GPS (+ в перспективе Galileo) обеспечивают возможность быстрого и высокоточного определения координат морского объекта, синхронизации в пространстве взаимного положения различных объектов, определения скорости и направления движения объектов в реальном времени. С учетом широкозонных дополнений, таких как американская WAAS, европейская EGNOS, японская MSAS, точность позиционирования на поверхности моря может достигать 1-2 м. Однако, когда НПА погружается под воду, связь со спутником прекращается. Тогда положение НПА определяется методом «счисления пути» посредством бортовых навигационных средств (компаса, датчиков скорости, датчика глубины, гироскопов), либо с помощью гидроакустического позиционирования.
Гидроакустическая навигационная система позиционирования (ГАНС) представляет собой систему, состоящую из нескольких стационарных передающих гидроакустических маяков, установленных на морском дне и сопровождающем судне, маяка-ответчика на НПА и узла обработки информации. Впрочем, используются и другие способы размещения маяков. В зависимости от этого различают ГАНС с длинной базой (ГАНС ДБ), ГАНС с короткой базой (ГАНС КБ), ГАНС с ультракороткой базой (ГАНС УКБ), их комбинации и комбинации со спутниковой навигацией.
ГАНС ДБ используют несколько маяков (транспондеров) с установленными на них акустическими приемопередатчиками. Эти маяки, расположенные в местах с известными географическими координатами, излучают звуковые волны, позволяя НПА определять дистанцию до них. Для работы системы в заданном районе необходимо использовать как минимум три акустических маяка. НПА производит триангуляцию для вычисления собственного положения относительно них. Для построения ГАНС ДБ используются три или более маяков, стационарно устанавливаемых на морском дне, на расстоянии примерно 500 метров друг от друга. Достоинства таких систем - высокая точность определения координат (субметровая точность), отсутствие влияния на точность волнения моря, неограниченная глубина использования. Недостатки - необходимость точной выставки маяков на морском дне, необходимость подъема их по окончании работ. Основное применение ГАНС ДБ - длительные работы по обследованию каких-либо подводных объектов, строительство и эксплуатация нефтедобывающих платформ, прокладка трубопроводов.
ГАНС УКБ работает на принципе определения координат маяка - ответчика по дистанции и углу. Дальность действия таких систем доходит до 4000 м. Обычно при работах до 1000 м точность определения координат не хуже 10 м. Этого достаточно для определения местоположения НПА, однако недостаточно для выполнения сложных подводных работ по бурению или строительству.
К достоинствам таких систем относят их сравнительно небольшую стоимость и мобильность. Их можно использовать практически на любом судне, вплоть до резиновой лодки, крепя приемо-передающую антенну (ППА) на штанге. К недостаткам относится высокая степень влияния качки на точность и работоспособность системы.
Примером ГАНС УКБ может служить ГАНС TrackLink 1500 американской компании LinkQuest, которая представляет собой портативную переносную систему, способную работать с любых типов судов-носителей и небольших катеров. Несколько десятков приёмо-передающих элементов конструктивно объединены в едином корпусе, который может опускаться в воду непосредственно с борта судна-носителя. Такое построение, с одной стороны, позволяет достичь высокой точности позиционирования, а с другой стороны, снизить массогабаритные размеры системы и время подготовки её к работе, что является немаловажным при проведении поисково-спасательных операций. При выполнении подводных работ, требующих высокоточного позиционирования, например прокладке и обследовании трубопроводов, строительстве гидротехнических сооружений и нефтяных платформ и т.п., рекомендуется стационарно закреплять ППА на специальной штанге для спуска с борта или монтировать выдвижную штангу в корпусе судна. Такой способ крепления обеспечивает стабильное положение ППА относительно судна-носителя, особенно при работе на сильном волнении и течениях.
Для установки на подводные объекты в состав ГАНС входят различные типы маяков-ответчиков, унифицированные по массогабаритным размерам и времени непрерывной работы. Питание маяков осуществляется от встроенных аккумуляторов или от бортовой сети подводных объектов. Использование современных технологии в производстве аккумуляторов питания обеспечивает длительную работу маяков-ответчиков в активном режиме. При длительном отсутствии сигналов-запросов с ППА маяк-ответчик автоматически переходит в режим ожидания для экономии ресурса аккумуляторов. Такой алгоритм работы обеспечивает длительное (до нескольких месяцев) нахождение маяка-ответчика под водой.
Обработка всех сигналов с ППА производится в надводном блоке управления и отображения, который представляет собой стационарный компьютер или ноутбук. В отличие от большинства аналогичных систем, предлагаемых на рынке, кабель данных с ППА подсоединяется непосредственно к последовательному порту компьютера (ноутбука). Математическая и графическая обработка данных осуществляется с помощью специального программного обеспечения. На экране монитора в реальном масштабе времени выводятся текущие координаты подводных объектов, параметры и траектория их движения относительно судна-носителя. Программное обеспечение имеет возможность дополнительно обрабатывать и выводить на монитор данные с навигационной системы GPS и внешнего датчика качки. Данные приборы подключаются к ноутбуку через последовательный порт или блок сопряжения.
Компания-производитель LinkQuest предлагает специальную модификацию ГАНС TrackLink 1500LC для работы с миниатюрными телеуправляемыми подводными аппаратами типа «СиБотикс». Такая система имеет специальную гидроакустическую антенну с защитой от поверхностных шумов способную работать с малых катеров или лодок и небольшой маяк-ответчик (вес в воде менее 200 г). Технические возможности системы позволяют осуществлять позиционирование подводного аппарата во всём диапазоне рабочих глубин.
В состав комплекта ГАНС TrackLink 1500 входит:
- гидроакустическая антенна с кабелем 20 метров;
- маяк-ответчик (в зависимости от типа подводного объекта) с зарядным устройством;
- ноутбук с установленным программным обеспечением;
- транспортировочный кейс;
- комплект ЗИП.
Дополнительно могут поставляться:
- до 8-ми маяков-ответчиков;
- навигационная система GPS (DGPS);
- внешний датчик качки.
Системы с короткой базой (ГАНС КБ) имеют несколько разнесенных друг от друга гидрофонов, расположенных в нижней части судна-носителя. Блок обработки, используя гидроакустические сигналы дистанции маяка-ответчика, выдает координаты подводного объекта в реальном масштабе времени. Достоинства такой системы - мобильность и достаточно высокая точность (около метра). Рабочая глубина ограничена 1000 м. Недостатки - требования к минимальной длине судна-носителя. Необходимость точной калибровки системы, большая чувствительность к волнению моря. В последнее время эти системы вытесняются более простыми и совершенными УКБ системами.
В последние годы на рынке систем позиционирования появилась принципиально новая гибридная система, которая использует принципы построения ГАНС ДБ и КБ типа с одновременным сопоставлением координат по сигналам от DGPS (дифференциальной GPS). Рассмотрим такую систему на примере.
Система гидроакустического позиционирования «GIB» (от английского GPS Intelligent Buoys) французской компании «ACSA» предназначена для определения текущих координат подводных объектов с большой точностью. В основе работы системы используется принцип определения координат подводного объекта относительно нескольких надводных плавающих буёв, местоположение которых в свою очередь определяется с помощью системы глобального позиционирования GPS или ГЛОНАСС. Плавающий буй состоит из гидроакустического приёмника (гидрофона) и приёмника GPS. На подводном аппарате устанавливается гидроакустический маяк с определённой частотой сигнала. Каждый буй определяет с помощью гидрофона пеленг и дистанцию до гидроакустического маяка. Одновременно, в строгой синхронизации по времени, полученным значениям приписываются текущие географические координаты буя. Все полученные данные в реальном масштабе времени пересылаются по радиомодему на пост слежения, расположенный на борту судна или на берегу. Специальное программное обеспечение с помощью математической обработки вычисляет реальные географические координаты подводного объекта, скорость и направление его движения. Все исходные и рассчитанные параметры сохраняются для последующей обработки, одновременно на экране монитора поста слежения выводится местоположение и траектория движения подводного объекта или объектов, судна-носителя и плавающих буев. Параметры и траектории движения могут отображаться либо в относительных координатах, например, относительно судна-носителя, либо в абсолютных географических координатах с нанесением непосредственно на электронную карту района проведения подводных работ. При выполнении работ по обнаружению и подъёму фрагментов затонувших объектов гидрофоны, установленные на буях определяют также пеленг и дистанцию до гидроакустического маяка, затонувшего объекта. Координаты и глубина маяка отображаются на электронной карте поста слежения, и оператор может направлять подводные аппараты или водолазов к объекту, ориентируясь по данным, выводимым на мониторе. - http://www.bnti.ru/des.asp?itm=3469HYPERLINK "http://www.bnti.ru/des.asp?itm=3469&tbl=02.04"&HYPERLINK "http://www.bnti.ru/des.asp?itm=3469&tbl=02.04"tbl=02.04
Благодаря своей мобильности, высокой скорости развертывания и нетребовательности к типу судна обеспечения, такая система идеальна для выполнения спасательных и поисковых работ. Специальный модуль, прилагаемый к данной системе, позволяет пеленговать акустические сигналы с черных ящиков потерпевших аварию самолетов или вертолетов и осуществлять вывод на них водолазов или подводных аппаратов.
Бортовые автономные средства навигации включают в себя: навигационно-пилотажные датчики (глубиномер, магнитный и гироскопический компасы, датчики крена и дифферента, измерители относительной и абсолютной скорости - индукционный и доплеровский лаги, датчики угловых скоростей) и инерциальную навигационную систему (ИНС), построенную на основе акселерометров и лазерных или оптоволоконных гироскопов. ИНС измеряет перемещения и ускорения НПА по трем осям и формирует данные для определения его географических координат, угловой ориентации, линейных и угловых скоростей.
В заключение приведем пример навигационной системы автономного необитаемого подводного аппарата (АНПА) GAVIA . Навигационный комплекс состоит из бортовой, гидроакустической, спутниковой навигационных систем:
- DGPS приемник с приемом поправок WAAS / EGNOS
- 3-осевой индукционный компас, датчик ориентации с углом охвата 360°, датчики ускорений
- ИНС с доплеровским лагом
- Гидроакустическая навигационная система с длинной и ультракороткой базой.
Бортовая система представляет собой комплексированную доплер-инерциальную систему, состоящую из высокоточной бесплатформенной инерциальной навигационной системы (ИНС) с лазерными гироскопами. ИНС корректируется данными доплеровского лага, который измеряет скорость аппарата над грунтом или относительно воды.
Использование данных о высоте над грунтом, предоставляемых доплеровским лагом, позволяет АНПА выдерживать глубины, необходимые для выполнения съемки ГБО или фотографической съемки. Для получения позиции в надводном положении используется приемник DGPS. Гидроакустическая навигационная система обеспечивает определение АНПА с установленным маяком-ответчиком относительно приемо-передающей антенны, либо относительно установленных на дне маяков, излучающих сигналы в окружающую среду.
В ближайшие годы, по нашему мнению, вполне вероятно появление нового метода навигации, основанного на применении технологии «дополненной реальности». Средства, реализующие данный метод, могут быть очень эффективными при позиционировании АНПА в условиях закрытых пространств, таких как интерьер затонувших судов, трубопроводов, бассейнов, а также в условиях сложных рельефов дна, расщелин, фьордов, гавань. Об этом методе вы можете прочитать в разделе 8. «Морская робототехника + доп. реальность».
Статью "20.07.2013. Развитие морской робототехники в России и за рубежом" Вы можете обсудить на
Принято делить беспилотные (необитаемые) аппараты, используемые на флотах (военно-морскими силами) по среде применения на надводные и подводные, а также на телеуправляемые и автономные. Также на обитаемых кораблях могут использоваться различные роботизированные системы.
Разработаны абордажные роботы, торпеды, способные автоматически атаковать корабли заданного типа, поисковые катера, противолодочные, дроны-мишени для обучения экипажей кораблей стрельбам или испытаний систем автоматического вооружения, средства разминирования и т.д. Разнообразие подводных аппаратов вскоре, как ожидается, пополнят подводные робокапсулы с различной полезной нагрузкой - от дронов до ракет.
Классификация, история, тренды
В зависимости от основого назначения морские военные аппараты делятся на следующие категории:
Поисковые и разведывательные устройства для обследования морского дна и других объектов. Могут действовать автономно или в режиме телеуправления. Одна из основных задач - противодействие минированию, обнаружение, классификация и локализация мин.
Ударные подводные роботы. Предназначены для борьбы с вражескими кораблями и подлодками и т.п.
Подводные "закладки" - робокапсулы, находящиеся под водой на дежурстве в течение многих недель или лет, которые по сигналу всплывают и активируют ту или иную полезную нагрузку.
Надводные устройства для патрулирования и обнаружения надводной враждебной активности в контролируемых водах
Надводные устройства для автоматического выявления и сопровождения подлодок
Автоматизированные огневые системы для борьбы с быстролетящими целяями.
Устройства для борьба с пиратами, контрабандистами и террористами. При обнаружении любой из опасных ситуаций такой робот может дать сигнал в центр управления. Если робот несет на себе вооружение, то получив сигнал командного центра, он может применить по цели бортовые системы вооружения.
Абордажные роботы, способные обеспечить быстрое попадание специальных подразделений на борт корабля
Роботизированные торпеды, способные автоматически распознавать тип корбаля определенного вида и атаковать его по команде оператора или без нее.
По форм-фактору морские роботы можно разделить на:
Роботизированные телеуправляемые катера
Роботизированные автономные надводные устройства различных конструкций
Подводные телеуправляемые необитаемые устройства
Подводные автономные необитаемые устройства
Абордажные роботы
Робокапсулы для сохранения полезной нагрузке на позиции под водой в готовом к эксплуатации режиме
Дроны-мишени для тренировки экипажей
Роботизированные торпеды
Гибридные конструкции, способные работать как подводная лодка и как надводный катер
История, тренды
2017
2005
PMS 325 USV Sweep System - разработка для ВМС США, как поддержка для кораблей прибрежной зоны.
Разрабатываются высокоскоростные надводные беспилотники на воздушных крыльях USSV-HS и низкоскоростные - USSV-LS.
2004
С 2004 года действует система корабельная система противоракетной обороны Aegis, способная автоматически обнаруживать и контратаковать направляющиеся к кораблям ракеты.
2003
В США начали использовать автономных роботов для поиска подводных мин.
Выпущены телеуправляемые катера Owl MK II, Navtek Inc. для использования в системах обеспечения безопасности порта.
Разработан телеуправляемый катер Spartan, совместно разработчиками из США, Франции и Сингапура для проверки технологий. Выпущено две версии - 7 м и 11 м. Модульные, многоцелевые, реконфигурируемые под текущую задачу.
Анонсирован беспилотный катер Radix Odyssey, дальнейшей информации о нем не встречается.
1990-е
В США появляется надводная телеуправляемая цель, запускаемая с борта корабля, SDST. Позднее она будет переименована в Roboski.
1980-е
На кораблях ВМС США с 80-х годов используются автоматические зенитно-артиллерийские комплексы Mark 15 Phalanx - многоствольные роботизированные орудия, наводящиеся по сигналу радара.
Флоты США Нидерландов, Объединенного Королевства, Дании, Швеции используют телеуправляемые катера для разминирования.
1950-е
В 1954 году создан удачный Высокоскоростной маневренный морской минный трал в США. Известны проекты мобильных беспилотных целей - QST-33, QST-34, QST-35/35A Septar и HSMST (High-speed maneuverable seaborne target), США.
1940-е
В 1944 году были созданы радиоуправляемые бранедры Ferngelenkte Sprenboote в Германии. Разработки радиуправляемых торпед Comox шли в Канаде, аналогичные работы проводили Франция и США.
1930-е
Появление в РСФСР телеуправляемых по радио катеров Вольт и Вольт-Р. Разработка Особого технического бюро под руководством Владимира Ивановича Бекаури (1882-1938). Радиостанция "У", электромеханический рулевой "элемру". Недостатком было отсутствие обратной связи - катера не передавали центру управления каких-либо сигналов, наведение их на цель осуществлялось визуально, дистанционно.
В 1935 году появился торпедный катер Г-5 советского производства.
1920-е
Под руководством А. Туполева в конце 20-х годов в РСФСР прошлого века были созданы радиоуправляемые торпедные катера Ш-4 с двумя торпедами на борту, дюралевые, без кают и кубриков. Радиоаппаратурой занимался А.Шорин. Выпускались дивизионами. Позднее катерами стали управлять с гидросамолетов МБР-2, летящих на высоте 2 тысячи метров.
1898
Известна "торпедная лодка" Николы Тесла, которую изобретатель называл "теле-автоматом". Прототип катера управлялся дистанционно по-радио, модель приводилась в движение электродвигателем. Аппарат демонстрировали на Electrical Show в Нью-Йорке. Проект финансировал Морган, разработкой конструкции лодки занимался архитектор Stanford White, Тесла руководил проектом и обеспечивал всю "электрику" и "радио" изделия. Длина лодки-прототипа 1.8 м. Полезной нагрузкой должна была быть взрывчатка. Идея не была востребована военным министерством США. У Тесла был патент под названием "Методы контроля и управляющие устройства для радиоуправляемых плавательных средств и колесных экипажей".

еще ранее
Прообразом беспилотных военных морских средств были брандеры - плавающие средства, загруженные горючими материалами, подожженые и направленные в сторону неприятельского флота с целью вызвать загорание или взрывы вражеских кораблей. До изобретения радио, они были неуправляемыми.
Известные проблемы
Стабильность платформ
Стандартизация полезной нагрузки
Стандартные интерфейсы с судами-матками
Юридические проблемы (Оттавская конвенция, брошенные суда)
Создание с нуля, как беспилотника или переделки обитаемых средств в беспилотные
Российский полностью автономный беспилотный подводный аппарат «Посейдон» не имеет аналогов в мире
История создания морских роботизированных систем началась в 1898 году в Мэдисон-сквер-гардене, когда на выставке известный сербский изобретатель Никола Тесла продемонстрировал радиоуправляемую подводную лодку. Некоторые считают, что идея создания водоплавающих роботов вновь проявилась в Японии в конце II Мировой войны, но на самом деле применение «человеко-торпед» было слишком иррациональным и малоэффективным.
После 1945-го развитие морских телеуправляемых аппаратов пошло по двум направлениям. В гражданской сфере появились глубоководные батискафы, впоследствии развившиеся до роботизированных исследовательских комплексов. А военные КБ старались создать надводные и подводные аппараты для выполнения целого спектра боевых задач. В итоге в США и России были созданы различные беспилотные надводные аппараты (БНА) и беспилотные подводные аппараты (БПА).
В военно-морских силах США необитаемые морские аппараты стали применяться сразу после II Мировой войны. В 1946 году во время испытаний атомных бомб на атолле Бикини ВМС США дистанционно осуществляли сбор проб воды с помощью БНА — радиоуправляемых катеров. В конце 1960-х на БНА устанавливалась аппаратура дистанционного управления для траления мин.
В 1994 году ВМС США опубликовали документ UUV Master Plan (Генеральный план по БПА), который предусматривал использование аппаратов для противоминной борьбы, сбора информации и океанографических задач в интересах флота. В 2004 году был опубликован новый план по подводным беспилотникам. В нем описывались миссии по разведке, противоминной и противолодочной борьбе, океанографии, связи и навигации, патрулированию и охране морских баз.
Сегодня в ВМС США классифицируют БНА и БПА по размерам и особенностям применения. Это позволяет разделить все роботизированные морские аппараты по четырем классам (для удобства сравнения применим эту градацию и для наших морских роботов).

X-Class. Аппараты представляют собой небольшие (до 3 м) БНА или БПА, которые должны обеспечивать действия групп сил спецопераций (ССО). Они могут вести разведку и обеспечивать действия корабельной ударной группировки (КУГ).
Harbor Class. БНА разрабатываются на базе стандартной 7-метровой лодки с жестким каркасом и предназначены для выполнения задач обеспечения морской безопасности, ведения разведки. Кроме того, аппарат может оснащаться различными огневыми средствами в виде боевых модулей. Скорость таких БНА, как правило, превышает 35 узлов, а автономность работы составляет около 12 часов.
Snorkeler Class. Представляет собой семиметровый БПА, предназначенный для противоминной борьбы, противолодочных операций, а также обеспечения действий ССО ВМС. Скорость под водой достигает 15 узлов, автономность — до 24 часов.
Fleet Class. 1 1-метровый БНА с жестким корпусом. Разработан для противоминной борьбы, противолодочной обороны, а также участия в морских операциях. Скорость аппарата варьируется от 32 до 35 узлов, автономность — до 48 часов.
Теперь рассмотрим БНА и БПА, которые стоят на службе ВМС США или разрабатываются в их интересах.
CUSV (Common Unmanned Surface Vessel). Беспилотный катер, относящийся к Fleet Class, разработан компанией Textron. В его задачи будут входить патрулирование, разведка и ударные операции. CUSV похож на обычный торпедный катер: 11 метров в длину, 3,08 м — в ширину, максимальная скорость — 28 узлов. Он может управляться либо оператором на дистанции до 20 км, либо через спутник на расстоянии до 1.920 км. Автономность работы CUSV составляет до 72 часов, на экономичном режиме — до одной недели.

ACTUV (Anti-Submarine Warfare Continous Trail Unmanned Vessel). Принадлежащий к Fleet Class 140-тонный БНА — автономный тримаран. Предназначение — охотник за подводными лодками. Способен разгоняться до 27 узлов, дальность плавания — до 6.000 км, автономность — до 80 суток. На борту имеет только сонары для обнаружения подлодок и средства связи с оператором для передачи координат найденной субмарины.
Ranger. БПА (X-Class) , разработан компанией Nekton Research для участия в экспедиционных миссиях, заданиях по обнаружению подводных мин, разведывательных и патрульных миссиях. Ranger рассчитан на непродолжительные задания, при общей длине 0,86 м он весит чуть меньше 20 кг и двигается со скоростью порядка 15 узлов.
REMUS (Remote Environmental Monitoring Units). Единственный в мире подводный робот (X-Class), принимавший участие в боевых действиях в ходе Иракской войны 2003 года. БПА разработан на базе гражданского исследовательского аппарата Remus-100 фирмы Hydroid, филиала компании Kongsberg Maritime. Решает задачи проведения противоминной разведки и подводно-инспекционных работ в условиях мелкого моря. REMUS оснащен гидролокатором бокового обзора, обладающим повышенной разрешающей способностью (5х5 см на дистанции 50 м), доплеровским лагом, приемником GPS, а также датчиками температуры и удельной электрической проводимости воды. Масса БПА — 30,8 кг, длина — 1,3 м, рабочая глубина — 150 м, автономность — до 22 часов, скорость подводного хода — 4 узла.

LDUUV (Large Displacement Unmanned Undersea Vehicle). Крупногабаритный боевой БПА (Snorkeler Class). По концепции командования ВМС США, БПА должен иметь длину около 6 м, скорость подводного хода до 6 узлов на рабочей глубине до 250 м. Автономность плавания должна быть не менее 70 суток. БПА должен выполнять боевые и специальные задачи в удаленных морских (океанских) районах. Вооружение LDUUV — четыре 324-мм торпеды и гидроакустические датчики (до 16). Ударный БПА должен применяться с береговых пунктов, надводных кораблей, из шахтной пусковой установки (ШПУ) многоцелевых атомных подводных лодок типа «Вирджиния» и типа «Огайо». Требования к массогабаритным характеристикам LDUUV во многом определялись размерами ШПУ этих лодок (диаметр — 2,2 м, высота — 7 м).
Морские роботы России
Минобороны России расширяет спектр применения БПА и БНА для проведения морской разведки, борьбы с кораблями и БПА, противоминной борьбы, координированного запуска групп БПА против особо важных целей противника, обнаружения и уничтожения инфраструктуры, например силовых кабелей.
Российский военный флот, как и ВМС США, считает приоритетным направлением интеграцию БПА в атомные и неатомные подводные лодки пятого поколения. Сегодня для ВМФ России разрабатываются, а в частях флота эксплуатируются морские роботы различного назначения.
«Искатель» . Роботизированный многофункциональный безэкипажный катер (Fleet Class — по американской классификации). Разрабатывается НПП АМЭ (Санкт-Петербург), сейчас ведутся испытания. Надводные объекты БНА «Искатель» должен обнаруживать и сопровождать на дальности 5 км при помощи оптико-электронной системы наблюдения, а подводные — с помощью гидролокационного оборудования. Масса целевой нагрузки катера — до 500 кг, радиус действия — до 30 км.

«Маевка» . Самоходный телеуправляемый искатель-уничтожитель мин (СТИУМ) (Snorkeler Class). Разработчик — ОАО «ГНПП «Регион»». Назначение этого БПА — поиск, обнаружение якорных, донных и придонных мин посредством встроенного гидролокатора секторного обзора. На базе БПА идет разработка новых противоминных БПА «Александрит-ИСПУМ».
«Клавесин» . Созданный в АО «ЦКБ МТ «Рубин»» БПА (Snorkeler Class) в различных модификациях давно стоит на вооружении ВМФ России. Он используется в исследовательских и разведывательных целях, проводит съемку и картографирование морского дна, поиск затонувших объектов. «Клавесин» внешне напоминает торпеду длиной около 6 м и массой в 2,5 т. Глубина погружения — 6 км. Аккумуляторные батареи БПА позволяют ему пройти расстояние до 300 км. Есть модификация под названием «Клавесин-2Р-ПМ», созданный специально для контроля акватории Северного Ледовитого океана.

«Юнона» . Еще одна модель от АО «ЦКБ МТ «Рубин»». Робот-беспилотник (X-Class) длиной 2,9 м, с глубиной погружения до 1 км и автономной дальностью 60 км. Запускаемая с корабля «Юнона» предназначена для тактической разведки в ближайшей от «родного борта» морской зоне.
«Амулет» . БПА (X-Class) разработан также АО «ЦКБ МТ «Рубин»». Длина робота — 1,6 м. В перечень задач входит проведение поисковых и исследовательских операций состояния подводной среды (температуры, давления и скорости распространения звука). Предельная глубина погружения — около 50 м, максимальная скорость подводного хода — 5,4 км/ч, дальность рабочей зоны — до 15 км.
«Обзор-600» . Спасательные силы Черноморского флота России приняли на вооружение созданный компанией «Тетис-ПРО» БПА (X-Class) в 2011 году. Основная задача робота — разведка морского дна и любых подводных объектов. «Обзор-600» способен работать на глубине до 600 м и развивать скорость до 3,5 узла. Он оснащен манипуляторами, которые могут поднять груз массой до 20 кг, а также гидролокатором, позволяющим обнаруживать подводные объекты на расстоянии до 100 м.

Внеклассовый БПА , не имеющий аналогов в мире, требует более подробного описания. До недавнего времени проект носил название «Статус-6». «Посейдон» представляет собой полностью автономный БПА, по сути являющийся быстрой глубоководной малозаметной атомной подводной лодкой малого размера.
Питание бортовых систем и водометных движителей осуществляет ядерный реактор с жидкометаллическим теплоносителем (ЖМТ) мощностью около 8 МВт. Реакторы с ЖМТ ставились на подлодку К-27 (проект 645 ЖМТ) и подводные лодки проектов 705/705К «Лира», которые могли достичь скорости подводного хода в 41 узел (76 км/ч). Поэтому многие специалисты считают, что подводная скорость «Посейдона» лежит в диапазоне от 55 до 100 узлов. При этом робот, изменяя скорость в широком диапазоне, может совершить переход на дальность 10.000 км на глубинах до 1 км. Это исключает его обнаружение развернутой в океанах гидроакустической противолодочной системой SOSSUS, которая контролирует подходы к побережью США.

Специалистами было просчитано, что «Посейдон» на крейсерской скорости 55 км/ч можно будет обнаружить не дальше, чем на расстоянии до 3 км. Но обнаружить — это только полдела, догнать «Посейдон» под водой не сможет ни одна существующая и перспективная торпеда ВМС стран НАТО. Самая глубоководная и быстроходная европейская торпеда MU90 Hard Kill, пущенная вдогон на скорости в 90 км/ч, сможет преследовать его только 10 км.
И это только «цветочки», а «ягодкой» является ядерная боеголовка мегатонного класса, которую может нести «Посейдон». Такой боезаряд может уничтожить авианесущее соединение (АУС), состоящее из трех ударных авианосцев, трех десятков кораблей сопровождения и пяти атомных подводных лодок. А если он достигнет акватории крупной военно-морской базы, то трагедия Перл-Харбора в декабре 1941 года понизится до уровня легкого детского испуга…
Сегодня задаются вопросом, а сколько «Посейдонов» может быть на атомных подводных лодках проекта 667БДР «Кальмар» и 667БДРМ «Дельфин», которые в справочниках обозначены как носители сверхмалых подводных лодок? Отвечаю, достаточно, чтобы авианосцы вероятного противника не покидали своих баз назначения.
Два главных геополитических игрока — США и Россия ведут разработки и производят все новые и новые БНА и БПА. В долгосрочной перспективе это может привести к изменению морских доктрин обороны и тактикам проведения военно-морских операций. Пока морские роботы зависят от носителей, резких изменений ожидать не стоит, но то что они уже внесли изменения в баланс военно-морских сил — становится неоспоримым фактом.
Алексей Леонков, военный эксперт журнала «Арсенал Отечества»

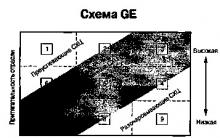





Морская робототехника военного назначения Морские робототехнические комплексы
Презентация на тему: "Холодильное оборудование" презентация к уроку на тему Презен
Силлогизмы, образованные на основе простого категорического силлогизма
Кто такой орнитолог и чем он занимается
Как провести накладные в 1с 8